Compare commits
22 Commits
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
de9528ebc7 | ||
|
|
77cab27c47 | ||
|
|
0091f08a1a | ||
|
|
5f4a6b2bea | ||
|
|
f0d4153a3c | ||
|
|
a83f85d59e | ||
|
|
902d7996ff | ||
|
|
137403ff31 | ||
|
|
7828d4eb00 | ||
|
|
b3d10d6d65 | ||
|
|
b82f9f5666 | ||
|
|
6a5ba1b719 | ||
|
|
4d40c9140c | ||
|
|
0ab63ff647 | ||
|
|
db33af065b | ||
|
|
1096f88e2b | ||
|
|
cef4a51223 | ||
|
|
edf5ba6a17 | ||
|
|
9941f1f61b | ||
|
|
46a9db0336 | ||
|
|
370146e4e0 | ||
|
|
5cd45c24bf |
@@ -25,17 +25,17 @@ jobs:
|
||||
steps:
|
||||
- name: Set up Docker Buildx
|
||||
uses: docker/setup-buildx-action@v1
|
||||
|
||||
|
||||
- name: Check out code
|
||||
uses: actions/checkout@v3
|
||||
|
||||
|
||||
- name: Find Changed Dockerfiles
|
||||
id: file_changes
|
||||
uses: jitterbit/get-changed-files@v1
|
||||
with:
|
||||
format: 'space-delimited'
|
||||
token: ${{ secrets.GITHUB_TOKEN }}
|
||||
|
||||
|
||||
- name: Build Changed Docker Images
|
||||
run: |
|
||||
CHANGED_FILES="${{ steps.file_changes.outputs.all }}"
|
||||
@@ -52,7 +52,7 @@ jobs:
|
||||
build-and-push-docker-images:
|
||||
runs-on: [ self-hosted, intel-cpu, 8-cpu, ci ]
|
||||
if: github.event_name != 'pull_request'
|
||||
|
||||
|
||||
permissions:
|
||||
contents: read
|
||||
packages: write
|
||||
@@ -69,6 +69,7 @@ jobs:
|
||||
- diffusers-flax-tpu
|
||||
- diffusers-onnxruntime-cpu
|
||||
- diffusers-onnxruntime-cuda
|
||||
- diffusers-doc-builder
|
||||
|
||||
steps:
|
||||
- name: Checkout repository
|
||||
|
||||
@@ -21,7 +21,7 @@ jobs:
|
||||
package: diffusers
|
||||
notebook_folder: diffusers_doc
|
||||
languages: en ko zh ja pt
|
||||
|
||||
custom_container: diffusers/diffusers-doc-builder
|
||||
secrets:
|
||||
token: ${{ secrets.HUGGINGFACE_PUSH }}
|
||||
hf_token: ${{ secrets.HF_DOC_BUILD_PUSH }}
|
||||
|
||||
@@ -20,3 +20,4 @@ jobs:
|
||||
install_libgl1: true
|
||||
package: diffusers
|
||||
languages: en ko zh ja pt
|
||||
custom_container: diffusers/diffusers-doc-builder
|
||||
|
||||
@@ -0,0 +1,73 @@
|
||||
name: Check running SLOW tests from a PR (only GPU)
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
inputs:
|
||||
docker_image:
|
||||
default: 'diffusers/diffusers-pytorch-cuda'
|
||||
description: 'Name of the Docker image'
|
||||
required: true
|
||||
branch:
|
||||
description: 'PR Branch to test on'
|
||||
required: true
|
||||
test:
|
||||
description: 'Tests to run (e.g.: `tests/models`).'
|
||||
required: true
|
||||
|
||||
env:
|
||||
DIFFUSERS_IS_CI: yes
|
||||
IS_GITHUB_CI: "1"
|
||||
HF_HOME: /mnt/cache
|
||||
OMP_NUM_THREADS: 8
|
||||
MKL_NUM_THREADS: 8
|
||||
PYTEST_TIMEOUT: 600
|
||||
RUN_SLOW: yes
|
||||
|
||||
jobs:
|
||||
run_tests:
|
||||
name: "Run a test on our runner from a PR"
|
||||
runs-on: [single-gpu, nvidia-gpu, t4, ci]
|
||||
container:
|
||||
image: ${{ github.event.inputs.docker_image }}
|
||||
options: --gpus 0 --privileged --ipc host -v /mnt/cache/.cache/huggingface:/mnt/cache/
|
||||
|
||||
steps:
|
||||
- name: Validate test files input
|
||||
id: validate_test_files
|
||||
env:
|
||||
PY_TEST: ${{ github.event.inputs.test }}
|
||||
run: |
|
||||
if [[ ! "$PY_TEST" =~ ^tests/ ]]; then
|
||||
echo "Error: The input string must start with 'tests/'."
|
||||
exit 1
|
||||
fi
|
||||
|
||||
if [[ ! "$PY_TEST" =~ ^tests/(models|pipelines) ]]; then
|
||||
echo "Error: The input string must contain either 'models' or 'pipelines' after 'tests/'."
|
||||
exit 1
|
||||
fi
|
||||
|
||||
if [[ "$PY_TEST" == *";"* ]]; then
|
||||
echo "Error: The input string must not contain ';'."
|
||||
exit 1
|
||||
fi
|
||||
echo "$PY_TEST"
|
||||
|
||||
- name: Checkout PR branch
|
||||
uses: actions/checkout@v4
|
||||
with:
|
||||
ref: ${{ github.event.inputs.branch }}
|
||||
repository: ${{ github.event.pull_request.head.repo.full_name }}
|
||||
|
||||
|
||||
- name: Install pytest
|
||||
run: |
|
||||
python -m venv /opt/venv && export PATH="/opt/venv/bin:$PATH"
|
||||
python -m uv pip install -e [quality,test]
|
||||
python -m uv pip install peft
|
||||
|
||||
- name: Run tests
|
||||
env:
|
||||
PY_TEST: ${{ github.event.inputs.test }}
|
||||
run: |
|
||||
pytest "$PY_TEST"
|
||||
@@ -77,7 +77,7 @@ Please refer to the [How to use Stable Diffusion in Apple Silicon](https://huggi
|
||||
|
||||
## Quickstart
|
||||
|
||||
Generating outputs is super easy with 🤗 Diffusers. To generate an image from text, use the `from_pretrained` method to load any pretrained diffusion model (browse the [Hub](https://huggingface.co/models?library=diffusers&sort=downloads) for 22000+ checkpoints):
|
||||
Generating outputs is super easy with 🤗 Diffusers. To generate an image from text, use the `from_pretrained` method to load any pretrained diffusion model (browse the [Hub](https://huggingface.co/models?library=diffusers&sort=downloads) for 25.000+ checkpoints):
|
||||
|
||||
```python
|
||||
from diffusers import DiffusionPipeline
|
||||
@@ -219,7 +219,7 @@ Also, say 👋 in our public Discord channel <a href="https://discord.gg/G7tWnz9
|
||||
- https://github.com/deep-floyd/IF
|
||||
- https://github.com/bentoml/BentoML
|
||||
- https://github.com/bmaltais/kohya_ss
|
||||
- +9000 other amazing GitHub repositories 💪
|
||||
- +11.000 other amazing GitHub repositories 💪
|
||||
|
||||
Thank you for using us ❤️.
|
||||
|
||||
|
||||
@@ -0,0 +1,51 @@
|
||||
FROM ubuntu:20.04
|
||||
LABEL maintainer="Hugging Face"
|
||||
LABEL repository="diffusers"
|
||||
|
||||
ENV DEBIAN_FRONTEND=noninteractive
|
||||
|
||||
RUN apt-get -y update \
|
||||
&& apt-get install -y software-properties-common \
|
||||
&& add-apt-repository ppa:deadsnakes/ppa
|
||||
|
||||
RUN apt install -y bash \
|
||||
build-essential \
|
||||
git \
|
||||
git-lfs \
|
||||
curl \
|
||||
ca-certificates \
|
||||
libsndfile1-dev \
|
||||
python3.10 \
|
||||
python3-pip \
|
||||
libgl1 \
|
||||
zip \
|
||||
python3.10-venv && \
|
||||
rm -rf /var/lib/apt/lists
|
||||
|
||||
# make sure to use venv
|
||||
RUN python3.10 -m venv /opt/venv
|
||||
ENV PATH="/opt/venv/bin:$PATH"
|
||||
|
||||
# pre-install the heavy dependencies (these can later be overridden by the deps from setup.py)
|
||||
RUN python3.10 -m pip install --no-cache-dir --upgrade pip uv==0.1.11 && \
|
||||
python3.10 -m uv pip install --no-cache-dir \
|
||||
torch \
|
||||
torchvision \
|
||||
torchaudio \
|
||||
invisible_watermark \
|
||||
--extra-index-url https://download.pytorch.org/whl/cpu && \
|
||||
python3.10 -m uv pip install --no-cache-dir \
|
||||
accelerate \
|
||||
datasets \
|
||||
hf-doc-builder \
|
||||
huggingface-hub \
|
||||
Jinja2 \
|
||||
librosa \
|
||||
numpy \
|
||||
scipy \
|
||||
tensorboard \
|
||||
transformers \
|
||||
matplotlib \
|
||||
setuptools==69.5.1
|
||||
|
||||
CMD ["/bin/bash"]
|
||||
@@ -93,6 +93,8 @@
|
||||
title: Trajectory Consistency Distillation-LoRA
|
||||
- local: using-diffusers/svd
|
||||
title: Stable Video Diffusion
|
||||
- local: using-diffusers/marigold_usage
|
||||
title: Marigold Computer Vision
|
||||
title: Specific pipeline examples
|
||||
- sections:
|
||||
- local: training/overview
|
||||
@@ -232,6 +234,12 @@
|
||||
title: ConsistencyDecoderVAE
|
||||
- local: api/models/transformer2d
|
||||
title: Transformer2D
|
||||
- local: api/models/pixart_transformer2d
|
||||
title: PixArtTransformer2D
|
||||
- local: api/models/dit_transformer2d
|
||||
title: DiTTransformer2D
|
||||
- local: api/models/hunyuan_transformer_2d
|
||||
title: HunyuanDiT2DModel
|
||||
- local: api/models/transformer_temporal
|
||||
title: Transformer Temporal
|
||||
- local: api/models/prior_transformer
|
||||
@@ -279,6 +287,8 @@
|
||||
title: DiffEdit
|
||||
- local: api/pipelines/dit
|
||||
title: DiT
|
||||
- local: api/pipelines/hunyuandit
|
||||
title: Hunyuan-DiT
|
||||
- local: api/pipelines/i2vgenxl
|
||||
title: I2VGen-XL
|
||||
- local: api/pipelines/pix2pix
|
||||
@@ -295,6 +305,8 @@
|
||||
title: Latent Diffusion
|
||||
- local: api/pipelines/ledits_pp
|
||||
title: LEDITS++
|
||||
- local: api/pipelines/marigold
|
||||
title: Marigold
|
||||
- local: api/pipelines/panorama
|
||||
title: MultiDiffusion
|
||||
- local: api/pipelines/musicldm
|
||||
|
||||
@@ -12,9 +12,9 @@ specific language governing permissions and limitations under the License.
|
||||
|
||||
# Loading Pipelines and Models via `from_single_file`
|
||||
|
||||
The `from_single_file` method allows you to load supported pipelines using a single checkpoint file as opposed to the folder format used by Diffusers. This is useful if you are working with many of the Stable Diffusion Web UI's (such as A1111) that extensively rely on a single file to distribute all the components of a diffusion model.
|
||||
The `from_single_file` method allows you to load supported pipelines using a single checkpoint file as opposed to Diffusers' multiple folders format. This is useful if you are working with Stable Diffusion Web UI's (such as A1111) that rely on a single file format to distribute all the components of a model.
|
||||
|
||||
The `from_single_file` method also supports loading models in their originally distributed format. This means that supported models that have been finetuned with other services can be loaded directly into supported Diffusers model objects and pipelines.
|
||||
The `from_single_file` method also supports loading models in their originally distributed format. This means that supported models that have been finetuned with other services can be loaded directly into Diffusers model objects and pipelines.
|
||||
|
||||
## Pipelines that currently support `from_single_file` loading
|
||||
|
||||
@@ -59,7 +59,7 @@ pipe = StableDiffusionXLPipeline.from_single_file(ckpt_path)
|
||||
|
||||
## Setting components in a Pipeline using `from_single_file`
|
||||
|
||||
Swap components of the pipeline by passing them directly to the `from_single_file` method. e.g If you would like use a different scheduler than the pipeline default.
|
||||
Set components of a pipeline by passing them directly to the `from_single_file` method. For example, here we are swapping out the pipeline's default scheduler with the `DDIMScheduler`.
|
||||
|
||||
```python
|
||||
from diffusers import StableDiffusionXLPipeline, DDIMScheduler
|
||||
@@ -71,13 +71,15 @@ pipe = StableDiffusionXLPipeline.from_single_file(ckpt_path, scheduler=scheduler
|
||||
|
||||
```
|
||||
|
||||
Here we are passing in a ControlNet model to the `StableDiffusionControlNetPipeline`.
|
||||
|
||||
```python
|
||||
from diffusers import StableDiffusionPipeline, ControlNetModel
|
||||
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel
|
||||
|
||||
ckpt_path = "https://huggingface.co/runwayml/stable-diffusion-v1-5/blob/main/v1-5-pruned-emaonly.safetensors"
|
||||
|
||||
controlnet = ControlNetModel.from_pretrained("https://huggingface.co/runwayml/stable-diffusion-v1-5/blob/main/v1-5-pruned-emaonly.safetensors")
|
||||
pipe = StableDiffusionPipeline.from_single_file(ckpt_path, controlnet=controlnet)
|
||||
controlnet = ControlNetModel.from_pretrained("lllyasviel/control_v11p_sd15_canny")
|
||||
pipe = StableDiffusionControlNetPipeline.from_single_file(ckpt_path, controlnet=controlnet)
|
||||
|
||||
```
|
||||
|
||||
@@ -93,7 +95,7 @@ model = StableCascadeUNet.from_single_file(ckpt_path)
|
||||
|
||||
## Using a Diffusers model repository to configure single file loading
|
||||
|
||||
Under the hood, `from_single_file` will try to determine a model repository to use to configure the components of the pipeline. You can also pass in a repository id to the `config` argument of the `from_single_file` method to explicitly set the repository to use.
|
||||
Under the hood, `from_single_file` will try to automatically determine a model repository to use to configure the components of a pipeline. You can also explicitly set the model repository to configure the pipeline with the `config` argument.
|
||||
|
||||
```python
|
||||
from diffusers import StableDiffusionXLPipeline
|
||||
@@ -105,9 +107,19 @@ pipe = StableDiffusionXLPipeline.from_single_file(ckpt_path, config=repo_id)
|
||||
|
||||
```
|
||||
|
||||
In the example above, since we explicitly passed `repo_id="segmind/SSD-1B"` to the `config` argument, it will use this [configuration file](https://huggingface.co/segmind/SSD-1B/blob/main/unet/config.json) from the `unet` subfolder in `"segmind/SSD-1B"` to configure the `unet` component of the pipeline; Similarly, it will use the `config.json` file from `vae` subfolder to configure the `vae` model, `config.json` file from `text_encoder` folder to configure `text_encoder` and so on.
|
||||
|
||||
<Tip>
|
||||
|
||||
Most of the time you do not need to explicitly set a `config` argument. `from_single_file` will automatically map the checkpoint to the appropriate model repository. However, this option can be useful in cases where model components in the checkpoint might have been changed from what was originally distributed, or in cases where a checkpoint file might not have the necessary metadata to correctly determine the configuration to use for the pipeline.
|
||||
|
||||
</Tip>
|
||||
|
||||
## Override configuration options when using single file loading
|
||||
|
||||
Override the default model or pipeline configuration options when using `from_single_file` by passing in the relevant arguments directly to the `from_single_file` method. Any argument that is supported by the model or pipeline class can be configured in this way:
|
||||
Override the default model or pipeline configuration options by providing the relevant arguments directly to the `from_single_file` method. Any argument supported by the model or pipeline class can be configured in this way:
|
||||
|
||||
### Setting a pipeline configuration option
|
||||
|
||||
```python
|
||||
from diffusers import StableDiffusionXLInstructPix2PixPipeline
|
||||
@@ -117,6 +129,8 @@ pipe = StableDiffusionXLInstructPix2PixPipeline.from_single_file(ckpt_path, conf
|
||||
|
||||
```
|
||||
|
||||
### Setting a model configuration option
|
||||
|
||||
```python
|
||||
from diffusers import UNet2DConditionModel
|
||||
|
||||
@@ -125,10 +139,6 @@ model = UNet2DConditionModel.from_single_file(ckpt_path, upcast_attention=True)
|
||||
|
||||
```
|
||||
|
||||
In the example above, since we explicitly passed `repo_id="segmind/SSD-1B"`, it will use this [configuration file](https://huggingface.co/segmind/SSD-1B/blob/main/unet/config.json) from the "unet" subfolder in `"segmind/SSD-1B"` to configure the unet component included in the checkpoint; Similarly, it will use the `config.json` file from `"vae"` subfolder to configure the vae model, `config.json` file from text_encoder folder to configure text_encoder and so on.
|
||||
|
||||
Note that most of the time you do not need to explicitly a `config` argument, `from_single_file` will automatically map the checkpoint to a repo id (we will discuss this in more details in next section). However, this can be useful in cases where model components might have been changed from what was originally distributed or in cases where a checkpoint file might not have the necessary metadata to correctly determine the configuration to use for the pipeline.
|
||||
|
||||
<Tip>
|
||||
|
||||
To learn more about how to load single file weights, see the [Load different Stable Diffusion formats](../../using-diffusers/other-formats) loading guide.
|
||||
@@ -137,9 +147,11 @@ To learn more about how to load single file weights, see the [Load different Sta
|
||||
|
||||
## Working with local files
|
||||
|
||||
As of `diffusers>=0.28.0` the `from_single_file` method will attempt to configure a pipeline or model by first inferring the model type from the checkpoint file and then using the model type to determine the appropriate model repo configuration to use from the Hugging Face Hub. For example, any single file checkpoint based on the Stable Diffusion XL base model will use the [`stabilityai/stable-diffusion-xl-base-1.0`](https://huggingface.co/stabilityai/stable-diffusion-xl-base-1.0) model repo to configure the pipeline.
|
||||
As of `diffusers>=0.28.0` the `from_single_file` method will attempt to configure a pipeline or model by first inferring the model type from the keys in the checkpoint file. This inferred model type is then used to determine the appropriate model repository on the Hugging Face Hub to configure the model or pipeline.
|
||||
|
||||
If you are working in an environment with restricted internet access, it is recommended to download the config files and checkpoints for the model to your preferred directory and pass the local paths to the `pretrained_model_link_or_path` and `config` arguments of the `from_single_file` method.
|
||||
For example, any single file checkpoint based on the Stable Diffusion XL base model will use the [`stabilityai/stable-diffusion-xl-base-1.0`](https://huggingface.co/stabilityai/stable-diffusion-xl-base-1.0) model repository to configure the pipeline.
|
||||
|
||||
If you are working in an environment with restricted internet access, it is recommended that you download the config files and checkpoints for the model to your preferred directory and pass the local paths to the `pretrained_model_link_or_path` and `config` arguments of the `from_single_file` method.
|
||||
|
||||
```python
|
||||
from huggingface_hub import hf_hub_download, snapshot_download
|
||||
@@ -211,13 +223,14 @@ pipe = StableDiffusionXLPipeline.from_single_file(my_local_checkpoint_path, conf
|
||||
```
|
||||
|
||||
<Tip>
|
||||
Disabling symlinking means that the `huggingface_hub` caching mechanism has no way to determine whether a file has already been downloaded to the local directory. This means that the `hf_hub_download` and `snapshot_download` functions will download files to the local directory each time they are executed. If you are disabling symlinking, it is recommended that you separate the model download and loading steps to avoid downloading the same file multiple times.
|
||||
|
||||
As of `huggingface_hub>=0.23.0` the `local_dir_use_symlinks` argument isn't necessary for the `hf_hub_download` and `snapshot_download` functions.
|
||||
|
||||
</Tip>
|
||||
|
||||
## Using the original configuration file of a model
|
||||
|
||||
If you would like to configure the parameters of the model components in the pipeline using the orignal YAML configuration file, you can pass a local path or url to the original configuration file to the `original_config` argument of the `from_single_file` method.
|
||||
If you would like to configure the model components in a pipeline using the orignal YAML configuration file, you can pass a local path or url to the original configuration file via the `original_config` argument.
|
||||
|
||||
```python
|
||||
from diffusers import StableDiffusionXLPipeline
|
||||
@@ -229,13 +242,12 @@ original_config = "https://raw.githubusercontent.com/Stability-AI/generative-mod
|
||||
pipe = StableDiffusionXLPipeline.from_single_file(ckpt_path, original_config=original_config)
|
||||
```
|
||||
|
||||
In the example above, the `original_config` file is only used to configure the parameters of the individual model components of the pipeline. For example it will be used to configure parameters such as the `in_channels` of the `vae` model and `unet` model. It is not used to determine the type of component objects in the pipeline.
|
||||
|
||||
|
||||
<Tip>
|
||||
When using `original_config` with local_files_only=True`, Diffusers will attempt to infer the components based on the type signatures of pipeline class, rather than attempting to fetch the pipeline config from the Hugging Face Hub. This is to prevent backwards breaking changes in existing code that might not be able to connect to the internet to fetch the necessary pipeline config files.
|
||||
|
||||
This is not as reliable as providing a path to a local config repo and might lead to errors when configuring the pipeline. To avoid this, please run the pipeline with `local_files_only=False` once to download the appropriate pipeline config files to the local cache.
|
||||
When using `original_config` with `local_files_only=True`, Diffusers will attempt to infer the components of the pipeline based on the type signatures of pipeline class, rather than attempting to fetch the configuration files from a model repository on the Hugging Face Hub. This is to prevent backward breaking changes in existing code that might not be able to connect to the internet to fetch the necessary configuration files.
|
||||
|
||||
This is not as reliable as providing a path to a local model repository using the `config` argument and might lead to errors when configuring the pipeline. To avoid this, please run the pipeline with `local_files_only=False` once to download the appropriate pipeline configuration files to the local cache.
|
||||
|
||||
</Tip>
|
||||
|
||||
|
||||
|
||||
@@ -0,0 +1,19 @@
|
||||
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# DiTTransformer2D
|
||||
|
||||
A Transformer model for image-like data from [DiT](https://huggingface.co/papers/2212.09748).
|
||||
|
||||
## DiTTransformer2DModel
|
||||
|
||||
[[autodoc]] DiTTransformer2DModel
|
||||
@@ -0,0 +1,20 @@
|
||||
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# HunyuanDiT2DModel
|
||||
|
||||
A Diffusion Transformer model for 2D data from [Hunyuan-DiT](https://github.com/Tencent/HunyuanDiT).
|
||||
|
||||
## HunyuanDiT2DModel
|
||||
|
||||
[[autodoc]] HunyuanDiT2DModel
|
||||
|
||||
@@ -0,0 +1,19 @@
|
||||
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# PixArtTransformer2D
|
||||
|
||||
A Transformer model for image-like data from [PixArt-Alpha](https://huggingface.co/papers/2310.00426) and [PixArt-Sigma](https://huggingface.co/papers/2403.04692).
|
||||
|
||||
## PixArtTransformer2DModel
|
||||
|
||||
[[autodoc]] PixArtTransformer2DModel
|
||||
@@ -0,0 +1,37 @@
|
||||
<!--Copyright 2024 The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Hunyuan-DiT
|
||||

|
||||
|
||||
[Hunyuan-DiT : A Powerful Multi-Resolution Diffusion Transformer with Fine-Grained Chinese Understanding](https://arxiv.org/abs/2405.08748)] from Tencent Hunyuan.
|
||||
|
||||
The abstract from the paper is:
|
||||
|
||||
*We present Hunyuan-DiT, a text-to-image diffusion transformer with fine-grained understanding of both English and Chinese. To construct Hunyuan-DiT, we carefully design the transformer structure, text encoder, and positional encoding. We also build from scratch a whole data pipeline to update and evaluate data for iterative model optimization. For fine-grained language understanding, we train a Multimodal Large Language Model to refine the captions of the images. Finally, Hunyuan-DiT can perform multi-turn multimodal dialogue with users, generating and refining images according to the context. Through our holistic human evaluation protocol with more than 50 professional human evaluators, Hunyuan-DiT sets a new state-of-the-art in Chinese-to-image generation compared with other open-source models.*
|
||||
|
||||
|
||||
You can find the original codebase at [Tencent/HunyuanDiT](https://github.com/Tencent/HunyuanDiT) and all the available checkpoints at [Tencent-Hunyuan](https://huggingface.co/Tencent-Hunyuan/HunyuanDiT).
|
||||
|
||||
**Highlights**: HunyuanDiT supports Chinese/English-to-image, multi-resolution generation.
|
||||
|
||||
HunyuanDiT has the following components:
|
||||
* It uses a diffusion transformer as the backbone
|
||||
* It combines two text encoders, a bilingual CLIP and a multilingual T5 encoder
|
||||
|
||||
|
||||
## HunyuanDiTPipeline
|
||||
|
||||
[[autodoc]] HunyuanDiTPipeline
|
||||
- all
|
||||
- __call__
|
||||
|
||||
@@ -47,6 +47,7 @@ Sample output with I2VGenXL:
|
||||
* Unlike SVD, it additionally accepts text prompts as inputs.
|
||||
* It can generate higher resolution videos.
|
||||
* When using the [`DDIMScheduler`] (which is default for this pipeline), less than 50 steps for inference leads to bad results.
|
||||
* This implementation is 1-stage variant of I2VGenXL. The main figure in the [I2VGen-XL](https://arxiv.org/abs/2311.04145) paper shows a 2-stage variant, however, 1-stage variant works well. See [this discussion](https://github.com/huggingface/diffusers/discussions/7952) for more details.
|
||||
|
||||
## I2VGenXLPipeline
|
||||
[[autodoc]] I2VGenXLPipeline
|
||||
|
||||
@@ -0,0 +1,76 @@
|
||||
<!--Copyright 2024 Marigold authors and The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Marigold Pipelines for Computer Vision Tasks
|
||||
|
||||
|
||||
|
||||
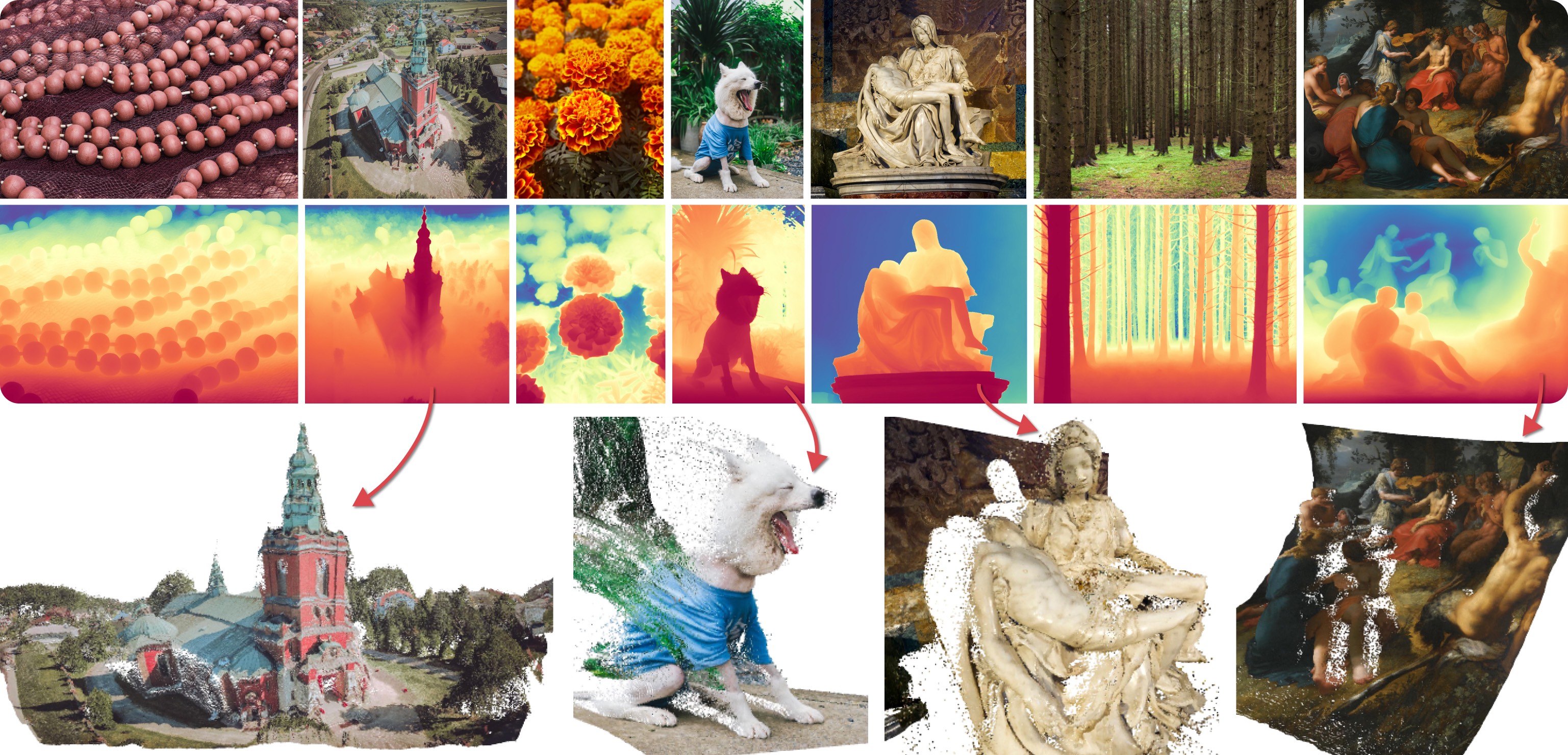
Marigold was proposed in [Repurposing Diffusion-Based Image Generators for Monocular Depth Estimation](https://huggingface.co/papers/2312.02145), a CVPR 2024 Oral paper by [Bingxin Ke](http://www.kebingxin.com/), [Anton Obukhov](https://www.obukhov.ai/), [Shengyu Huang](https://shengyuh.github.io/), [Nando Metzger](https://nandometzger.github.io/), [Rodrigo Caye Daudt](https://rcdaudt.github.io/), and [Konrad Schindler](https://scholar.google.com/citations?user=FZuNgqIAAAAJ&hl=en).
|
||||
The idea is to repurpose the rich generative prior of Text-to-Image Latent Diffusion Models (LDMs) for traditional computer vision tasks.
|
||||
Initially, this idea was explored to fine-tune Stable Diffusion for Monocular Depth Estimation, as shown in the teaser above.
|
||||
Later,
|
||||
- [Tianfu Wang](https://tianfwang.github.io/) trained the first Latent Consistency Model (LCM) of Marigold, which unlocked fast single-step inference;
|
||||
- [Kevin Qu](https://www.linkedin.com/in/kevin-qu-b3417621b/?locale=en_US) extended the approach to Surface Normals Estimation;
|
||||
- [Anton Obukhov](https://www.obukhov.ai/) contributed the pipelines and documentation into diffusers (enabled and supported by [YiYi Xu](https://yiyixuxu.github.io/) and [Sayak Paul](https://sayak.dev/)).
|
||||
|
||||
The abstract from the paper is:
|
||||
|
||||
*Monocular depth estimation is a fundamental computer vision task. Recovering 3D depth from a single image is geometrically ill-posed and requires scene understanding, so it is not surprising that the rise of deep learning has led to a breakthrough. The impressive progress of monocular depth estimators has mirrored the growth in model capacity, from relatively modest CNNs to large Transformer architectures. Still, monocular depth estimators tend to struggle when presented with images with unfamiliar content and layout, since their knowledge of the visual world is restricted by the data seen during training, and challenged by zero-shot generalization to new domains. This motivates us to explore whether the extensive priors captured in recent generative diffusion models can enable better, more generalizable depth estimation. We introduce Marigold, a method for affine-invariant monocular depth estimation that is derived from Stable Diffusion and retains its rich prior knowledge. The estimator can be fine-tuned in a couple of days on a single GPU using only synthetic training data. It delivers state-of-the-art performance across a wide range of datasets, including over 20% performance gains in specific cases. Project page: https://marigoldmonodepth.github.io.*
|
||||
|
||||
## Available Pipelines
|
||||
|
||||
Each pipeline supports one Computer Vision task, which takes an input RGB image as input and produces a *prediction* of the modality of interest, such as a depth map of the input image.
|
||||
Currently, the following tasks are implemented:
|
||||
|
||||
| Pipeline | Predicted Modalities | Demos |
|
||||
|---------------------------------------------------------------------------------------------------------------------------------------------|------------------------------------------------------------------------------------------------------------------|:--------------------------------------------------------------------------------------------------------------------------------------------------:|
|
||||
| [MarigoldDepthPipeline](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/marigold/pipeline_marigold_depth.py) | [Depth](https://en.wikipedia.org/wiki/Depth_map), [Disparity](https://en.wikipedia.org/wiki/Binocular_disparity) | [Fast Demo (LCM)](https://huggingface.co/spaces/prs-eth/marigold-lcm), [Slow Original Demo (DDIM)](https://huggingface.co/spaces/prs-eth/marigold) |
|
||||
| [MarigoldNormalsPipeline](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/marigold/pipeline_marigold_normals.py) | [Surface normals](https://en.wikipedia.org/wiki/Normal_mapping) | [Fast Demo (LCM)](https://huggingface.co/spaces/prs-eth/marigold-normals-lcm) |
|
||||
|
||||
|
||||
## Available Checkpoints
|
||||
|
||||
The original checkpoints can be found under the [PRS-ETH](https://huggingface.co/prs-eth/) Hugging Face organization.
|
||||
|
||||
<Tip>
|
||||
|
||||
Make sure to check out the Schedulers [guide](../../using-diffusers/schedulers) to learn how to explore the tradeoff between scheduler speed and quality, and see the [reuse components across pipelines](../../using-diffusers/loading#reuse-components-across-pipelines) section to learn how to efficiently load the same components into multiple pipelines. Also, to know more about reducing the memory usage of this pipeline, refer to the ["Reduce memory usage"] section [here](../../using-diffusers/svd#reduce-memory-usage).
|
||||
|
||||
</Tip>
|
||||
|
||||
<Tip warning={true}>
|
||||
|
||||
Marigold pipelines were designed and tested only with `DDIMScheduler` and `LCMScheduler`.
|
||||
Depending on the scheduler, the number of inference steps required to get reliable predictions varies, and there is no universal value that works best across schedulers.
|
||||
Because of that, the default value of `num_inference_steps` in the `__call__` method of the pipeline is set to `None` (see the API reference).
|
||||
Unless set explicitly, its value will be taken from the checkpoint configuration `model_index.json`.
|
||||
This is done to ensure high-quality predictions when calling the pipeline with just the `image` argument.
|
||||
|
||||
</Tip>
|
||||
|
||||
See also Marigold [usage examples](marigold_usage).
|
||||
|
||||
## MarigoldDepthPipeline
|
||||
[[autodoc]] MarigoldDepthPipeline
|
||||
- all
|
||||
- __call__
|
||||
|
||||
## MarigoldNormalsPipeline
|
||||
[[autodoc]] MarigoldNormalsPipeline
|
||||
- all
|
||||
- __call__
|
||||
|
||||
## MarigoldDepthOutput
|
||||
[[autodoc]] pipelines.marigold.pipeline_marigold_depth.MarigoldDepthOutput
|
||||
|
||||
## MarigoldNormalsOutput
|
||||
[[autodoc]] pipelines.marigold.pipeline_marigold_normals.MarigoldNormalsOutput
|
||||
@@ -6,7 +6,7 @@ Before you begin, make sure you install T-GATE.
|
||||
|
||||
```bash
|
||||
pip install tgate
|
||||
pip install -U pytorch diffusers transformers accelerate DeepCache
|
||||
pip install -U torch diffusers transformers accelerate DeepCache
|
||||
```
|
||||
|
||||
|
||||
@@ -46,12 +46,12 @@ pipe = TgatePixArtLoader(
|
||||
|
||||
image = pipe.tgate(
|
||||
"An alpaca made of colorful building blocks, cyberpunk.",
|
||||
gate_step=gate_step,
|
||||
gate_step=gate_step,
|
||||
num_inference_steps=inference_step,
|
||||
).images[0]
|
||||
```
|
||||
</hfoption>
|
||||
<hfoption id="Stable Diffusion XL">
|
||||
<hfoption id="Stable Diffusion XL">
|
||||
|
||||
Accelerate `StableDiffusionXLPipeline` with T-GATE:
|
||||
|
||||
@@ -78,9 +78,9 @@ pipe = TgateSDXLLoader(
|
||||
).to("cuda")
|
||||
|
||||
image = pipe.tgate(
|
||||
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
|
||||
gate_step=gate_step,
|
||||
num_inference_steps=inference_step
|
||||
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
|
||||
gate_step=gate_step,
|
||||
num_inference_steps=inference_step
|
||||
).images[0]
|
||||
```
|
||||
</hfoption>
|
||||
@@ -111,9 +111,9 @@ pipe = TgateSDXLDeepCacheLoader(
|
||||
).to("cuda")
|
||||
|
||||
image = pipe.tgate(
|
||||
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
|
||||
gate_step=gate_step,
|
||||
num_inference_steps=inference_step
|
||||
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
|
||||
gate_step=gate_step,
|
||||
num_inference_steps=inference_step
|
||||
).images[0]
|
||||
```
|
||||
</hfoption>
|
||||
@@ -151,9 +151,9 @@ pipe = TgateSDXLLoader(
|
||||
).to("cuda")
|
||||
|
||||
image = pipe.tgate(
|
||||
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
|
||||
gate_step=gate_step,
|
||||
num_inference_steps=inference_step
|
||||
"Astronaut in a jungle, cold color palette, muted colors, detailed, 8k.",
|
||||
gate_step=gate_step,
|
||||
num_inference_steps=inference_step
|
||||
).images[0]
|
||||
```
|
||||
</hfoption>
|
||||
|
||||
@@ -260,7 +260,7 @@ Then, you'll need a way to evaluate the model. For evaluation, you can use the [
|
||||
... # The default pipeline output type is `List[PIL.Image]`
|
||||
... images = pipeline(
|
||||
... batch_size=config.eval_batch_size,
|
||||
... generator=torch.manual_seed(config.seed),
|
||||
... generator=torch.Generator(device='cpu').manual_seed(config.seed), # Use a separate torch generator to avoid rewinding the random state of the main training loop
|
||||
... ).images
|
||||
|
||||
... # Make a grid out of the images
|
||||
|
||||
@@ -78,7 +78,7 @@ image = pipe(
|
||||
prompt=prompt,
|
||||
num_inference_steps=4,
|
||||
guidance_scale=0,
|
||||
eta=0.3,
|
||||
eta=0.3,
|
||||
generator=torch.Generator(device=device).manual_seed(0),
|
||||
).images[0]
|
||||
```
|
||||
@@ -156,14 +156,14 @@ image = pipe(
|
||||
prompt=prompt,
|
||||
num_inference_steps=8,
|
||||
guidance_scale=0,
|
||||
eta=0.3,
|
||||
eta=0.3,
|
||||
generator=torch.Generator(device=device).manual_seed(0),
|
||||
).images[0]
|
||||
```
|
||||
|
||||

|
||||
|
||||
TCD-LoRA also supports other LoRAs trained on different styles. For example, let's load the [TheLastBen/Papercut_SDXL](https://huggingface.co/TheLastBen/Papercut_SDXL) LoRA and fuse it with the TCD-LoRA with the [`~loaders.UNet2DConditionLoadersMixin.set_adapters`] method.
|
||||
TCD-LoRA also supports other LoRAs trained on different styles. For example, let's load the [TheLastBen/Papercut_SDXL](https://huggingface.co/TheLastBen/Papercut_SDXL) LoRA and fuse it with the TCD-LoRA with the [`~loaders.UNet2DConditionLoadersMixin.set_adapters`] method.
|
||||
|
||||
> [!TIP]
|
||||
> Check out the [Merge LoRAs](merge_loras) guide to learn more about efficient merging methods.
|
||||
@@ -171,7 +171,7 @@ TCD-LoRA also supports other LoRAs trained on different styles. For example, let
|
||||
```python
|
||||
import torch
|
||||
from diffusers import StableDiffusionXLPipeline
|
||||
from scheduling_tcd import TCDScheduler
|
||||
from scheduling_tcd import TCDScheduler
|
||||
|
||||
device = "cuda"
|
||||
base_model_id = "stabilityai/stable-diffusion-xl-base-1.0"
|
||||
@@ -191,7 +191,7 @@ image = pipe(
|
||||
prompt=prompt,
|
||||
num_inference_steps=4,
|
||||
guidance_scale=0,
|
||||
eta=0.3,
|
||||
eta=0.3,
|
||||
generator=torch.Generator(device=device).manual_seed(0),
|
||||
).images[0]
|
||||
```
|
||||
@@ -215,7 +215,7 @@ from PIL import Image
|
||||
from transformers import DPTFeatureExtractor, DPTForDepthEstimation
|
||||
from diffusers import ControlNetModel, StableDiffusionXLControlNetPipeline
|
||||
from diffusers.utils import load_image, make_image_grid
|
||||
from scheduling_tcd import TCDScheduler
|
||||
from scheduling_tcd import TCDScheduler
|
||||
|
||||
device = "cuda"
|
||||
depth_estimator = DPTForDepthEstimation.from_pretrained("Intel/dpt-hybrid-midas").to(device)
|
||||
@@ -249,13 +249,13 @@ controlnet = ControlNetModel.from_pretrained(
|
||||
controlnet_id,
|
||||
torch_dtype=torch.float16,
|
||||
variant="fp16",
|
||||
).to(device)
|
||||
)
|
||||
pipe = StableDiffusionXLControlNetPipeline.from_pretrained(
|
||||
base_model_id,
|
||||
controlnet=controlnet,
|
||||
torch_dtype=torch.float16,
|
||||
variant="fp16",
|
||||
).to(device)
|
||||
)
|
||||
pipe.enable_model_cpu_offload()
|
||||
|
||||
pipe.scheduler = TCDScheduler.from_config(pipe.scheduler.config)
|
||||
@@ -271,9 +271,9 @@ depth_image = get_depth_map(image)
|
||||
controlnet_conditioning_scale = 0.5 # recommended for good generalization
|
||||
|
||||
image = pipe(
|
||||
prompt,
|
||||
image=depth_image,
|
||||
num_inference_steps=4,
|
||||
prompt,
|
||||
image=depth_image,
|
||||
num_inference_steps=4,
|
||||
guidance_scale=0,
|
||||
eta=0.3,
|
||||
controlnet_conditioning_scale=controlnet_conditioning_scale,
|
||||
@@ -290,7 +290,7 @@ grid_image = make_image_grid([depth_image, image], rows=1, cols=2)
|
||||
import torch
|
||||
from diffusers import ControlNetModel, StableDiffusionXLControlNetPipeline
|
||||
from diffusers.utils import load_image, make_image_grid
|
||||
from scheduling_tcd import TCDScheduler
|
||||
from scheduling_tcd import TCDScheduler
|
||||
|
||||
device = "cuda"
|
||||
base_model_id = "stabilityai/stable-diffusion-xl-base-1.0"
|
||||
@@ -301,13 +301,13 @@ controlnet = ControlNetModel.from_pretrained(
|
||||
controlnet_id,
|
||||
torch_dtype=torch.float16,
|
||||
variant="fp16",
|
||||
).to(device)
|
||||
)
|
||||
pipe = StableDiffusionXLControlNetPipeline.from_pretrained(
|
||||
base_model_id,
|
||||
controlnet=controlnet,
|
||||
torch_dtype=torch.float16,
|
||||
variant="fp16",
|
||||
).to(device)
|
||||
)
|
||||
pipe.enable_model_cpu_offload()
|
||||
|
||||
pipe.scheduler = TCDScheduler.from_config(pipe.scheduler.config)
|
||||
@@ -322,9 +322,9 @@ canny_image = load_image("https://huggingface.co/datasets/hf-internal-testing/di
|
||||
controlnet_conditioning_scale = 0.5 # recommended for good generalization
|
||||
|
||||
image = pipe(
|
||||
prompt,
|
||||
image=canny_image,
|
||||
num_inference_steps=4,
|
||||
prompt,
|
||||
image=canny_image,
|
||||
num_inference_steps=4,
|
||||
guidance_scale=0,
|
||||
eta=0.3,
|
||||
controlnet_conditioning_scale=controlnet_conditioning_scale,
|
||||
@@ -336,7 +336,7 @@ grid_image = make_image_grid([canny_image, image], rows=1, cols=2)
|
||||

|
||||
|
||||
<Tip>
|
||||
The inference parameters in this example might not work for all examples, so we recommend you to try different values for `num_inference_steps`, `guidance_scale`, `controlnet_conditioning_scale` and `cross_attention_kwargs` parameters and choose the best one.
|
||||
The inference parameters in this example might not work for all examples, so we recommend you to try different values for `num_inference_steps`, `guidance_scale`, `controlnet_conditioning_scale` and `cross_attention_kwargs` parameters and choose the best one.
|
||||
</Tip>
|
||||
|
||||
</hfoption>
|
||||
@@ -350,7 +350,7 @@ from diffusers import StableDiffusionXLPipeline
|
||||
from diffusers.utils import load_image, make_image_grid
|
||||
|
||||
from ip_adapter import IPAdapterXL
|
||||
from scheduling_tcd import TCDScheduler
|
||||
from scheduling_tcd import TCDScheduler
|
||||
|
||||
device = "cuda"
|
||||
base_model_path = "stabilityai/stable-diffusion-xl-base-1.0"
|
||||
@@ -359,8 +359,8 @@ ip_ckpt = "sdxl_models/ip-adapter_sdxl.bin"
|
||||
tcd_lora_id = "h1t/TCD-SDXL-LoRA"
|
||||
|
||||
pipe = StableDiffusionXLPipeline.from_pretrained(
|
||||
base_model_path,
|
||||
torch_dtype=torch.float16,
|
||||
base_model_path,
|
||||
torch_dtype=torch.float16,
|
||||
variant="fp16"
|
||||
)
|
||||
pipe.scheduler = TCDScheduler.from_config(pipe.scheduler.config)
|
||||
@@ -375,13 +375,13 @@ ref_image = load_image("https://raw.githubusercontent.com/tencent-ailab/IP-Adapt
|
||||
prompt = "best quality, high quality, wearing sunglasses"
|
||||
|
||||
image = ip_model.generate(
|
||||
pil_image=ref_image,
|
||||
pil_image=ref_image,
|
||||
prompt=prompt,
|
||||
scale=0.5,
|
||||
num_samples=1,
|
||||
num_inference_steps=4,
|
||||
num_samples=1,
|
||||
num_inference_steps=4,
|
||||
guidance_scale=0,
|
||||
eta=0.3,
|
||||
eta=0.3,
|
||||
seed=0,
|
||||
)[0]
|
||||
|
||||
|
||||
@@ -230,7 +230,7 @@ from diffusers.utils import load_image, make_image_grid
|
||||
|
||||
pipeline = AutoPipelineForInpainting.from_pretrained(
|
||||
"runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16, variant="fp16"
|
||||
).to("cuda")
|
||||
)
|
||||
pipeline.enable_model_cpu_offload()
|
||||
# remove following line if xFormers is not installed or you have PyTorch 2.0 or higher installed
|
||||
pipeline.enable_xformers_memory_efficient_attention()
|
||||
@@ -255,7 +255,7 @@ from diffusers.utils import load_image, make_image_grid
|
||||
|
||||
pipeline = AutoPipelineForInpainting.from_pretrained(
|
||||
"runwayml/stable-diffusion-inpainting", torch_dtype=torch.float16, variant="fp16"
|
||||
).to("cuda")
|
||||
)
|
||||
pipeline.enable_model_cpu_offload()
|
||||
# remove following line if xFormers is not installed or you have PyTorch 2.0 or higher installed
|
||||
pipeline.enable_xformers_memory_efficient_attention()
|
||||
@@ -296,7 +296,7 @@ from diffusers.utils import load_image, make_image_grid
|
||||
|
||||
pipeline = AutoPipelineForInpainting.from_pretrained(
|
||||
"runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16, variant="fp16"
|
||||
).to("cuda")
|
||||
)
|
||||
pipeline.enable_model_cpu_offload()
|
||||
# remove following line if xFormers is not installed or you have PyTorch 2.0 or higher installed
|
||||
pipeline.enable_xformers_memory_efficient_attention()
|
||||
@@ -319,7 +319,7 @@ from diffusers.utils import load_image, make_image_grid
|
||||
|
||||
pipeline = AutoPipelineForInpainting.from_pretrained(
|
||||
"runwayml/stable-diffusion-inpainting", torch_dtype=torch.float16, variant="fp16"
|
||||
).to("cuda")
|
||||
)
|
||||
pipeline.enable_model_cpu_offload()
|
||||
# remove following line if xFormers is not installed or you have PyTorch 2.0 or higher installed
|
||||
pipeline.enable_xformers_memory_efficient_attention()
|
||||
|
||||
@@ -0,0 +1,466 @@
|
||||
<!--Copyright 2024 Marigold authors and The HuggingFace Team. All rights reserved.
|
||||
|
||||
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
|
||||
the License. You may obtain a copy of the License at
|
||||
|
||||
http://www.apache.org/licenses/LICENSE-2.0
|
||||
|
||||
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
|
||||
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
|
||||
specific language governing permissions and limitations under the License.
|
||||
-->
|
||||
|
||||
# Marigold Pipelines for Computer Vision Tasks
|
||||
|
||||
[Marigold](../api/pipelines/marigold) is a novel diffusion-based dense prediction approach, and a set of pipelines for various computer vision tasks, such as monocular depth estimation.
|
||||
|
||||
This guide will show you how to use Marigold to obtain fast and high-quality predictions for images and videos.
|
||||
|
||||
Each pipeline supports one Computer Vision task, which takes an input RGB image as input and produces a *prediction* of the modality of interest, such as a depth map of the input image.
|
||||
Currently, the following tasks are implemented:
|
||||
|
||||
| Pipeline | Predicted Modalities | Demos |
|
||||
|---------------------------------------------------------------------------------------------------------------------------------------------|------------------------------------------------------------------------------------------------------------------|:--------------------------------------------------------------------------------------------------------------------------------------------------:|
|
||||
| [MarigoldDepthPipeline](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/marigold/pipeline_marigold_depth.py) | [Depth](https://en.wikipedia.org/wiki/Depth_map), [Disparity](https://en.wikipedia.org/wiki/Binocular_disparity) | [Fast Demo (LCM)](https://huggingface.co/spaces/prs-eth/marigold-lcm), [Slow Original Demo (DDIM)](https://huggingface.co/spaces/prs-eth/marigold) |
|
||||
| [MarigoldNormalsPipeline](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/marigold/pipeline_marigold_normals.py) | [Surface normals](https://en.wikipedia.org/wiki/Normal_mapping) | [Fast Demo (LCM)](https://huggingface.co/spaces/prs-eth/marigold-normals-lcm) |
|
||||
|
||||
The original checkpoints can be found under the [PRS-ETH](https://huggingface.co/prs-eth/) Hugging Face organization.
|
||||
These checkpoints are meant to work with diffusers pipelines and the [original codebase](https://github.com/prs-eth/marigold).
|
||||
The original code can also be used to train new checkpoints.
|
||||
|
||||
| Checkpoint | Modality | Comment |
|
||||
|-----------------------------------------------------------------------------------------------|----------|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
|
||||
| [prs-eth/marigold-v1-0](https://huggingface.co/prs-eth/marigold-v1-0) | Depth | The first Marigold Depth checkpoint, which predicts *affine-invariant depth* maps. The performance of this checkpoint in benchmarks was studied in the original [paper](https://huggingface.co/papers/2312.02145). Designed to be used with the `DDIMScheduler` at inference, it requires at least 10 steps to get reliable predictions. Affine-invariant depth prediction has a range of values in each pixel between 0 (near plane) and 1 (far plane); both planes are chosen by the model as part of the inference process. See the `MarigoldImageProcessor` reference for visualization utilities. |
|
||||
| [prs-eth/marigold-depth-lcm-v1-0](https://huggingface.co/prs-eth/marigold-depth-lcm-v1-0) | Depth | The fast Marigold Depth checkpoint, fine-tuned from `prs-eth/marigold-v1-0`. Designed to be used with the `LCMScheduler` at inference, it requires as little as 1 step to get reliable predictions. The prediction reliability saturates at 4 steps and declines after that. |
|
||||
| [prs-eth/marigold-normals-v0-1](https://huggingface.co/prs-eth/marigold-normals-v0-1) | Normals | A preview checkpoint for the Marigold Normals pipeline. Designed to be used with the `DDIMScheduler` at inference, it requires at least 10 steps to get reliable predictions. The surface normals predictions are unit-length 3D vectors with values in the range from -1 to 1. *This checkpoint will be phased out after the release of `v1-0` version.* |
|
||||
| [prs-eth/marigold-normals-lcm-v0-1](https://huggingface.co/prs-eth/marigold-normals-lcm-v0-1) | Normals | The fast Marigold Normals checkpoint, fine-tuned from `prs-eth/marigold-normals-v0-1`. Designed to be used with the `LCMScheduler` at inference, it requires as little as 1 step to get reliable predictions. The prediction reliability saturates at 4 steps and declines after that. *This checkpoint will be phased out after the release of `v1-0` version.* |
|
||||
The examples below are mostly given for depth prediction, but they can be universally applied with other supported modalities.
|
||||
We showcase the predictions using the same input image of Albert Einstein generated by Midjourney.
|
||||
This makes it easier to compare visualizations of the predictions across various modalities and checkpoints.
|
||||
|
||||
<div class="flex gap-4" style="justify-content: center; width: 100%;">
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://marigoldmonodepth.github.io/images/einstein.jpg"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Example input image for all Marigold pipelines
|
||||
</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
### Depth Prediction Quick Start
|
||||
|
||||
To get the first depth prediction, load `prs-eth/marigold-depth-lcm-v1-0` checkpoint into `MarigoldDepthPipeline` pipeline, put the image through the pipeline, and save the predictions:
|
||||
|
||||
```python
|
||||
import diffusers
|
||||
import torch
|
||||
|
||||
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
|
||||
"prs-eth/marigold-depth-lcm-v1-0", variant="fp16", torch_dtype=torch.float16
|
||||
).to("cuda")
|
||||
|
||||
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
depth = pipe(image)
|
||||
|
||||
vis = pipe.image_processor.visualize_depth(depth.prediction)
|
||||
vis[0].save("einstein_depth.png")
|
||||
|
||||
depth_16bit = pipe.image_processor.export_depth_to_16bit_png(depth.prediction)
|
||||
depth_16bit[0].save("einstein_depth_16bit.png")
|
||||
```
|
||||
|
||||
The visualization function for depth [`~pipelines.marigold.marigold_image_processing.MarigoldImageProcessor.visualize_depth`] applies one of [matplotlib's colormaps](https://matplotlib.org/stable/users/explain/colors/colormaps.html) (`Spectral` by default) to map the predicted pixel values from a single-channel `[0, 1]` depth range into an RGB image.
|
||||
With the `Spectral` colormap, pixels with near depth are painted red, and far pixels are assigned blue color.
|
||||
The 16-bit PNG file stores the single channel values mapped linearly from the `[0, 1]` range into `[0, 65535]`.
|
||||
Below are the raw and the visualized predictions; as can be seen, dark areas (mustache) are easier to distinguish in the visualization:
|
||||
|
||||
<div class="flex gap-4">
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_einstein_lcm_depth_16bit.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Predicted depth (16-bit PNG)
|
||||
</figcaption>
|
||||
</div>
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_einstein_lcm_depth.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Predicted depth visualization (Spectral)
|
||||
</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
### Surface Normals Prediction Quick Start
|
||||
|
||||
Load `prs-eth/marigold-normals-lcm-v0-1` checkpoint into `MarigoldNormalsPipeline` pipeline, put the image through the pipeline, and save the predictions:
|
||||
|
||||
```python
|
||||
import diffusers
|
||||
import torch
|
||||
|
||||
pipe = diffusers.MarigoldNormalsPipeline.from_pretrained(
|
||||
"prs-eth/marigold-normals-lcm-v0-1", variant="fp16", torch_dtype=torch.float16
|
||||
).to("cuda")
|
||||
|
||||
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
normals = pipe(image)
|
||||
|
||||
vis = pipe.image_processor.visualize_normals(normals.prediction)
|
||||
vis[0].save("einstein_normals.png")
|
||||
```
|
||||
|
||||
The visualization function for normals [`~pipelines.marigold.marigold_image_processing.MarigoldImageProcessor.visualize_normals`] maps the three-dimensional prediction with pixel values in the range `[-1, 1]` into an RGB image.
|
||||
The visualization function supports flipping surface normals axes to make the visualization compatible with other choices of the frame of reference.
|
||||
Conceptually, each pixel is painted according to the surface normal vector in the frame of reference, where `X` axis points right, `Y` axis points up, and `Z` axis points at the viewer.
|
||||
Below is the visualized prediction:
|
||||
|
||||
<div class="flex gap-4" style="justify-content: center; width: 100%;">
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_einstein_lcm_normals.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Predicted surface normals visualization
|
||||
</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
In this example, the nose tip almost certainly has a point on the surface, in which the surface normal vector points straight at the viewer, meaning that its coordinates are `[0, 0, 1]`.
|
||||
This vector maps to the RGB `[128, 128, 255]`, which corresponds to the violet-blue color.
|
||||
Similarly, a surface normal on the cheek in the right part of the image has a large `X` component, which increases the red hue.
|
||||
Points on the shoulders pointing up with a large `Y` promote green color.
|
||||
|
||||
### Speeding up inference
|
||||
|
||||
The above quick start snippets are already optimized for speed: they load the LCM checkpoint, use the `fp16` variant of weights and computation, and perform just one denoising diffusion step.
|
||||
The `pipe(image)` call completes in 280ms on RTX 3090 GPU.
|
||||
Internally, the input image is encoded with the Stable Diffusion VAE encoder, then the U-Net performs one denoising step, and finally, the prediction latent is decoded with the VAE decoder into pixel space.
|
||||
In this case, two out of three module calls are dedicated to converting between pixel and latent space of LDM.
|
||||
Because Marigold's latent space is compatible with the base Stable Diffusion, it is possible to speed up the pipeline call by more than 3x (85ms on RTX 3090) by using a [lightweight replacement of the SD VAE](../api/models/autoencoder_tiny):
|
||||
|
||||
```diff
|
||||
import diffusers
|
||||
import torch
|
||||
|
||||
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
|
||||
"prs-eth/marigold-depth-lcm-v1-0", variant="fp16", torch_dtype=torch.float16
|
||||
).to("cuda")
|
||||
|
||||
+ pipe.vae = diffusers.AutoencoderTiny.from_pretrained(
|
||||
+ "madebyollin/taesd", torch_dtype=torch.float16
|
||||
+ ).cuda()
|
||||
|
||||
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
depth = pipe(image)
|
||||
```
|
||||
|
||||
As suggested in [Optimizations](../optimization/torch2.0#torch.compile), adding `torch.compile` may squeeze extra performance depending on the target hardware:
|
||||
|
||||
```diff
|
||||
import diffusers
|
||||
import torch
|
||||
|
||||
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
|
||||
"prs-eth/marigold-depth-lcm-v1-0", variant="fp16", torch_dtype=torch.float16
|
||||
).to("cuda")
|
||||
|
||||
+ pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
|
||||
|
||||
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
depth = pipe(image)
|
||||
```
|
||||
|
||||
## Qualitative Comparison with Depth Anything
|
||||
|
||||
With the above speed optimizations, Marigold delivers predictions with more details and faster than [Depth Anything](https://huggingface.co/docs/transformers/main/en/model_doc/depth_anything) with the largest checkpoint [LiheYoung/depth-anything-large-hf](https://huggingface.co/LiheYoung/depth-anything-large-hf):
|
||||
|
||||
<div class="flex gap-4">
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_einstein_lcm_depth.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Marigold LCM fp16 with Tiny AutoEncoder
|
||||
</figcaption>
|
||||
</div>
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/einstein_depthanything_large.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Depth Anything Large
|
||||
</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
## Maximizing Precision and Ensembling
|
||||
|
||||
Marigold pipelines have a built-in ensembling mechanism combining multiple predictions from different random latents.
|
||||
This is a brute-force way of improving the precision of predictions, capitalizing on the generative nature of diffusion.
|
||||
The ensembling path is activated automatically when the `ensemble_size` argument is set greater than `1`.
|
||||
When aiming for maximum precision, it makes sense to adjust `num_inference_steps` simultaneously with `ensemble_size`.
|
||||
The recommended values vary across checkpoints but primarily depend on the scheduler type.
|
||||
The effect of ensembling is particularly well-seen with surface normals:
|
||||
|
||||
```python
|
||||
import diffusers
|
||||
|
||||
model_path = "prs-eth/marigold-normals-v1-0"
|
||||
|
||||
model_paper_kwargs = {
|
||||
diffusers.schedulers.DDIMScheduler: {
|
||||
"num_inference_steps": 10,
|
||||
"ensemble_size": 10,
|
||||
},
|
||||
diffusers.schedulers.LCMScheduler: {
|
||||
"num_inference_steps": 4,
|
||||
"ensemble_size": 5,
|
||||
},
|
||||
}
|
||||
|
||||
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
|
||||
pipe = diffusers.MarigoldNormalsPipeline.from_pretrained(model_path).to("cuda")
|
||||
pipe_kwargs = model_paper_kwargs[type(pipe.scheduler)]
|
||||
|
||||
depth = pipe(image, **pipe_kwargs)
|
||||
|
||||
vis = pipe.image_processor.visualize_normals(depth.prediction)
|
||||
vis[0].save("einstein_normals.png")
|
||||
```
|
||||
|
||||
<div class="flex gap-4">
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_einstein_lcm_normals.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Surface normals, no ensembling
|
||||
</figcaption>
|
||||
</div>
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_einstein_normals.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Surface normals, with ensembling
|
||||
</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
As can be seen, all areas with fine-grained structurers, such as hair, got more conservative and on average more correct predictions.
|
||||
Such a result is more suitable for precision-sensitive downstream tasks, such as 3D reconstruction.
|
||||
|
||||
## Quantitative Evaluation
|
||||
|
||||
To evaluate Marigold quantitatively in standard leaderboards and benchmarks (such as NYU, KITTI, and other datasets), follow the evaluation protocol outlined in the paper: load the full precision fp32 model and use appropriate values for `num_inference_steps` and `ensemble_size`.
|
||||
Optionally seed randomness to ensure reproducibility. Maximizing `batch_size` will deliver maximum device utilization.
|
||||
|
||||
```python
|
||||
import diffusers
|
||||
import torch
|
||||
|
||||
device = "cuda"
|
||||
seed = 2024
|
||||
model_path = "prs-eth/marigold-v1-0"
|
||||
|
||||
model_paper_kwargs = {
|
||||
diffusers.schedulers.DDIMScheduler: {
|
||||
"num_inference_steps": 50,
|
||||
"ensemble_size": 10,
|
||||
},
|
||||
diffusers.schedulers.LCMScheduler: {
|
||||
"num_inference_steps": 4,
|
||||
"ensemble_size": 10,
|
||||
},
|
||||
}
|
||||
|
||||
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
|
||||
generator = torch.Generator(device=device).manual_seed(seed)
|
||||
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(model_path).to(device)
|
||||
pipe_kwargs = model_paper_kwargs[type(pipe.scheduler)]
|
||||
|
||||
depth = pipe(image, generator=generator, **pipe_kwargs)
|
||||
|
||||
# evaluate metrics
|
||||
```
|
||||
|
||||
## Using Predictive Uncertainty
|
||||
|
||||
The ensembling mechanism built into Marigold pipelines combines multiple predictions obtained from different random latents.
|
||||
As a side effect, it can be used to quantify epistemic (model) uncertainty; simply specify `ensemble_size` greater than 1 and set `output_uncertainty=True`.
|
||||
The resulting uncertainty will be available in the `uncertainty` field of the output.
|
||||
It can be visualized as follows:
|
||||
|
||||
```python
|
||||
import diffusers
|
||||
import torch
|
||||
|
||||
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
|
||||
"prs-eth/marigold-depth-lcm-v1-0", variant="fp16", torch_dtype=torch.float16
|
||||
).to("cuda")
|
||||
|
||||
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
depth = pipe(
|
||||
image,
|
||||
ensemble_size=10, # any number greater than 1; higher values yield higher precision
|
||||
output_uncertainty=True,
|
||||
)
|
||||
|
||||
uncertainty = pipe.image_processor.visualize_uncertainty(depth.uncertainty)
|
||||
uncertainty[0].save("einstein_depth_uncertainty.png")
|
||||
```
|
||||
|
||||
<div class="flex gap-4">
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_einstein_depth_uncertainty.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Depth uncertainty
|
||||
</figcaption>
|
||||
</div>
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_einstein_normals_uncertainty.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Surface normals uncertainty
|
||||
</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
The interpretation of uncertainty is easy: higher values (white) correspond to pixels, where the model struggles to make consistent predictions.
|
||||
Evidently, the depth model is the least confident around edges with discontinuity, where the object depth changes drastically.
|
||||
The surface normals model is the least confident in fine-grained structures, such as hair, and dark areas, such as the collar.
|
||||
|
||||
## Frame-by-frame Video Processing with Temporal Consistency
|
||||
|
||||
Due to Marigold's generative nature, each prediction is unique and defined by the random noise sampled for the latent initialization.
|
||||
This becomes an obvious drawback compared to traditional end-to-end dense regression networks, as exemplified in the following videos:
|
||||
|
||||
<div class="flex gap-4">
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_obama.gif"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">Input video</figcaption>
|
||||
</div>
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_obama_depth_independent.gif"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">Marigold Depth applied to input video frames independently</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
To address this issue, it is possible to pass `latents` argument to the pipelines, which defines the starting point of diffusion.
|
||||
Empirically, we found that a convex combination of the very same starting point noise latent and the latent corresponding to the previous frame prediction give sufficiently smooth results, as implemented in the snippet below:
|
||||
|
||||
```python
|
||||
import imageio
|
||||
from PIL import Image
|
||||
from tqdm import tqdm
|
||||
import diffusers
|
||||
import torch
|
||||
|
||||
device = "cuda"
|
||||
path_in = "obama.mp4"
|
||||
path_out = "obama_depth.gif"
|
||||
|
||||
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
|
||||
"prs-eth/marigold-depth-lcm-v1-0", variant="fp16", torch_dtype=torch.float16
|
||||
).to(device)
|
||||
pipe.vae = diffusers.AutoencoderTiny.from_pretrained(
|
||||
"madebyollin/taesd", torch_dtype=torch.float16
|
||||
).to(device)
|
||||
pipe.set_progress_bar_config(disable=True)
|
||||
|
||||
with imageio.get_reader(path_in) as reader:
|
||||
size = reader.get_meta_data()['size']
|
||||
last_frame_latent = None
|
||||
latent_common = torch.randn(
|
||||
(1, 4, 768 * size[1] // (8 * max(size)), 768 * size[0] // (8 * max(size)))
|
||||
).to(device=device, dtype=torch.float16)
|
||||
|
||||
out = []
|
||||
for frame_id, frame in tqdm(enumerate(reader), desc="Processing Video"):
|
||||
frame = Image.fromarray(frame)
|
||||
latents = latent_common
|
||||
if last_frame_latent is not None:
|
||||
latents = 0.9 * latents + 0.1 * last_frame_latent
|
||||
|
||||
depth = pipe(
|
||||
frame, match_input_resolution=False, latents=latents, output_latent=True,
|
||||
)
|
||||
last_frame_latent = depth.latent
|
||||
out.append(pipe.image_processor.visualize_depth(depth.prediction)[0])
|
||||
|
||||
diffusers.utils.export_to_gif(out, path_out, fps=reader.get_meta_data()['fps'])
|
||||
```
|
||||
|
||||
Here, the diffusion process starts from the given computed latent.
|
||||
The pipeline sets `output_latent=True` to access `out.latent` and computes its contribution to the next frame's latent initialization.
|
||||
The result is much more stable now:
|
||||
|
||||
<div class="flex gap-4">
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_obama_depth_independent.gif"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">Marigold Depth applied to input video frames independently</figcaption>
|
||||
</div>
|
||||
<div style="flex: 1 1 50%; max-width: 50%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/marigold_obama_depth_consistent.gif"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">Marigold Depth with forced latents initialization</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
## Marigold for ControlNet
|
||||
|
||||
A very common application for depth prediction with diffusion models comes in conjunction with ControlNet.
|
||||
Depth crispness plays a crucial role in obtaining high-quality results from ControlNet.
|
||||
As seen in comparisons with other methods above, Marigold excels at that task.
|
||||
The snippet below demonstrates how to load an image, compute depth, and pass it into ControlNet in a compatible format:
|
||||
|
||||
```python
|
||||
import torch
|
||||
import diffusers
|
||||
|
||||
device = "cuda"
|
||||
generator = torch.Generator(device=device).manual_seed(2024)
|
||||
image = diffusers.utils.load_image(
|
||||
"https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet_depth_source.png"
|
||||
)
|
||||
|
||||
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
|
||||
"prs-eth/marigold-depth-lcm-v1-0", torch_dtype=torch.float16, variant="fp16"
|
||||
).to("cuda")
|
||||
|
||||
depth_image = pipe(image, generator=generator).prediction
|
||||
depth_image = pipe.image_processor.visualize_depth(depth_image, color_map="binary")
|
||||
depth_image[0].save("motorcycle_controlnet_depth.png")
|
||||
|
||||
controlnet = diffusers.ControlNetModel.from_pretrained(
|
||||
"diffusers/controlnet-depth-sdxl-1.0", torch_dtype=torch.float16, variant="fp16"
|
||||
).to("cuda")
|
||||
pipe = diffusers.StableDiffusionXLControlNetPipeline.from_pretrained(
|
||||
"SG161222/RealVisXL_V4.0", torch_dtype=torch.float16, variant="fp16", controlnet=controlnet
|
||||
).to("cuda")
|
||||
pipe.scheduler = diffusers.DPMSolverMultistepScheduler.from_config(pipe.scheduler.config, use_karras_sigmas=True)
|
||||
|
||||
controlnet_out = pipe(
|
||||
prompt="high quality photo of a sports bike, city",
|
||||
negative_prompt="",
|
||||
guidance_scale=6.5,
|
||||
num_inference_steps=25,
|
||||
image=depth_image,
|
||||
controlnet_conditioning_scale=0.7,
|
||||
control_guidance_end=0.7,
|
||||
generator=generator,
|
||||
).images
|
||||
controlnet_out[0].save("motorcycle_controlnet_out.png")
|
||||
```
|
||||
|
||||
<div class="flex gap-4">
|
||||
<div style="flex: 1 1 33%; max-width: 33%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet_depth_source.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Input image
|
||||
</figcaption>
|
||||
</div>
|
||||
<div style="flex: 1 1 33%; max-width: 33%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/motorcycle_controlnet_depth.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
Depth in the format compatible with ControlNet
|
||||
</figcaption>
|
||||
</div>
|
||||
<div style="flex: 1 1 33%; max-width: 33%;">
|
||||
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/marigold/motorcycle_controlnet_out.png"/>
|
||||
<figcaption class="mt-1 text-center text-sm text-gray-500">
|
||||
ControlNet generation, conditioned on depth and prompt: "high quality photo of a sports bike, city"
|
||||
</figcaption>
|
||||
</div>
|
||||
</div>
|
||||
|
||||
Hopefully, you will find Marigold useful for solving your downstream tasks, be it a part of a more broad generative workflow, or a perception task, such as 3D reconstruction.
|
||||
@@ -71,7 +71,7 @@ from diffusers.utils.import_utils import is_xformers_available
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -78,7 +78,7 @@ from diffusers.utils.torch_utils import is_compiled_module
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -69,6 +69,7 @@ Please also check out our [Community Scripts](https://github.com/huggingface/dif
|
||||
| UFOGen Scheduler | Scheduler for UFOGen Model (compatible with Stable Diffusion pipelines) | [UFOGen Scheduler](#ufogen-scheduler) | - | [dg845](https://github.com/dg845) |
|
||||
| Stable Diffusion XL IPEX Pipeline | Accelerate Stable Diffusion XL inference pipeline with BF16/FP32 precision on Intel Xeon CPUs with [IPEX](https://github.com/intel/intel-extension-for-pytorch) | [Stable Diffusion XL on IPEX](#stable-diffusion-xl-on-ipex) | - | [Dan Li](https://github.com/ustcuna/) |
|
||||
| Stable Diffusion BoxDiff Pipeline | Training-free controlled generation with bounding boxes using [BoxDiff](https://github.com/showlab/BoxDiff) | [Stable Diffusion BoxDiff Pipeline](#stable-diffusion-boxdiff) | - | [Jingyang Zhang](https://github.com/zjysteven/) |
|
||||
| FRESCO V2V Pipeline | Implementation of [[CVPR 2024] FRESCO: Spatial-Temporal Correspondence for Zero-Shot Video Translation](https://arxiv.org/abs/2403.12962) | [FRESCO V2V Pipeline](#fresco) | - | [Yifan Zhou](https://github.com/SingleZombie) |
|
||||
|
||||
To load a custom pipeline you just need to pass the `custom_pipeline` argument to `DiffusionPipeline`, as one of the files in `diffusers/examples/community`. Feel free to send a PR with your own pipelines, we will merge them quickly.
|
||||
|
||||
@@ -239,12 +240,12 @@ pipeline_output = pipe(
|
||||
# denoising_steps=10, # (optional) Number of denoising steps of each inference pass. Default: 10.
|
||||
# ensemble_size=10, # (optional) Number of inference passes in the ensemble. Default: 10.
|
||||
# ------------------------------------------------
|
||||
|
||||
|
||||
# ----- recommended setting for LCM version ------
|
||||
# denoising_steps=4,
|
||||
# ensemble_size=5,
|
||||
# -------------------------------------------------
|
||||
|
||||
|
||||
# processing_res=768, # (optional) Maximum resolution of processing. If set to 0: will not resize at all. Defaults to 768.
|
||||
# match_input_res=True, # (optional) Resize depth prediction to match input resolution.
|
||||
# batch_size=0, # (optional) Inference batch size, no bigger than `num_ensemble`. If set to 0, the script will automatically decide the proper batch size. Defaults to 0.
|
||||
@@ -1031,7 +1032,7 @@ image = pipe().images[0]
|
||||
|
||||
Make sure you have @crowsonkb's <https://github.com/crowsonkb/k-diffusion> installed:
|
||||
|
||||
```
|
||||
```sh
|
||||
pip install k-diffusion
|
||||
```
|
||||
|
||||
@@ -1853,13 +1854,13 @@ To use this pipeline, you need to:
|
||||
|
||||
You can simply use pip to install IPEX with the latest version.
|
||||
|
||||
```python
|
||||
```sh
|
||||
python -m pip install intel_extension_for_pytorch
|
||||
```
|
||||
|
||||
**Note:** To install a specific version, run with the following command:
|
||||
|
||||
```
|
||||
```sh
|
||||
python -m pip install intel_extension_for_pytorch==<version_name> -f https://developer.intel.com/ipex-whl-stable-cpu
|
||||
```
|
||||
|
||||
@@ -1957,13 +1958,13 @@ To use this pipeline, you need to:
|
||||
|
||||
You can simply use pip to install IPEX with the latest version.
|
||||
|
||||
```python
|
||||
```sh
|
||||
python -m pip install intel_extension_for_pytorch
|
||||
```
|
||||
|
||||
**Note:** To install a specific version, run with the following command:
|
||||
|
||||
```
|
||||
```sh
|
||||
python -m pip install intel_extension_for_pytorch==<version_name> -f https://developer.intel.com/ipex-whl-stable-cpu
|
||||
```
|
||||
|
||||
@@ -3009,8 +3010,8 @@ This code implements a pipeline for the Stable Diffusion model, enabling the div
|
||||
|
||||
### Sample Code
|
||||
|
||||
```
|
||||
from from examples.community.regional_prompting_stable_diffusion import RegionalPromptingStableDiffusionPipeline
|
||||
```py
|
||||
from examples.community.regional_prompting_stable_diffusion import RegionalPromptingStableDiffusionPipeline
|
||||
pipe = RegionalPromptingStableDiffusionPipeline.from_single_file(model_path, vae=vae)
|
||||
|
||||
rp_args = {
|
||||
@@ -4035,6 +4036,93 @@ onestep_image = pipe(prompt, num_inference_steps=1).images[0]
|
||||
multistep_image = pipe(prompt, num_inference_steps=4).images[0]
|
||||
```
|
||||
|
||||
### FRESCO
|
||||
|
||||
This is the Diffusers implementation of zero-shot video-to-video translation pipeline [FRESCO](https://github.com/williamyang1991/FRESCO) (without Ebsynth postprocessing and background smooth). To run the code, please install gmflow. Then modify the path in `gmflow_dir`. After that, you can run the pipeline with:
|
||||
|
||||
```py
|
||||
from PIL import Image
|
||||
import cv2
|
||||
import torch
|
||||
import numpy as np
|
||||
|
||||
from diffusers import ControlNetModel,DDIMScheduler, DiffusionPipeline
|
||||
import sys
|
||||
gmflow_dir = "/path/to/gmflow"
|
||||
sys.path.insert(0, gmflow_dir)
|
||||
|
||||
def video_to_frame(video_path: str, interval: int):
|
||||
vidcap = cv2.VideoCapture(video_path)
|
||||
success = True
|
||||
|
||||
count = 0
|
||||
res = []
|
||||
while success:
|
||||
count += 1
|
||||
success, image = vidcap.read()
|
||||
if count % interval != 1:
|
||||
continue
|
||||
if image is not None:
|
||||
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
|
||||
res.append(image)
|
||||
if len(res) >= 8:
|
||||
break
|
||||
|
||||
vidcap.release()
|
||||
return res
|
||||
|
||||
|
||||
input_video_path = 'https://github.com/williamyang1991/FRESCO/raw/main/data/car-turn.mp4'
|
||||
output_video_path = 'car.gif'
|
||||
|
||||
# You can use any fintuned SD here
|
||||
model_path = 'SG161222/Realistic_Vision_V2.0'
|
||||
|
||||
prompt = 'a red car turns in the winter'
|
||||
a_prompt = ', RAW photo, subject, (high detailed skin:1.2), 8k uhd, dslr, soft lighting, high quality, film grain, Fujifilm XT3, '
|
||||
n_prompt = '(deformed iris, deformed pupils, semi-realistic, cgi, 3d, render, sketch, cartoon, drawing, anime, mutated hands and fingers:1.4), (deformed, distorted, disfigured:1.3), poorly drawn, bad anatomy, wrong anatomy, extra limb, missing limb, floating limbs, disconnected limbs, mutation, mutated, ugly, disgusting, amputation'
|
||||
|
||||
input_interval = 5
|
||||
frames = video_to_frame(
|
||||
input_video_path, input_interval)
|
||||
|
||||
control_frames = []
|
||||
# get canny image
|
||||
for frame in frames:
|
||||
image = cv2.Canny(frame, 50, 100)
|
||||
np_image = np.array(image)
|
||||
np_image = np_image[:, :, None]
|
||||
np_image = np.concatenate([np_image, np_image, np_image], axis=2)
|
||||
canny_image = Image.fromarray(np_image)
|
||||
control_frames.append(canny_image)
|
||||
|
||||
# You can use any ControlNet here
|
||||
controlnet = ControlNetModel.from_pretrained(
|
||||
"lllyasviel/sd-controlnet-canny").to('cuda')
|
||||
|
||||
pipe = DiffusionPipeline.from_pretrained(
|
||||
model_path, controlnet=controlnet, custom_pipeline='fresco_v2v').to('cuda')
|
||||
pipe.scheduler = DDIMScheduler.from_config(pipe.scheduler.config)
|
||||
|
||||
generator = torch.manual_seed(0)
|
||||
frames = [Image.fromarray(frame) for frame in frames]
|
||||
|
||||
output_frames = pipe(
|
||||
prompt + a_prompt,
|
||||
frames,
|
||||
control_frames,
|
||||
num_inference_steps=20,
|
||||
strength=0.75,
|
||||
controlnet_conditioning_scale=0.7,
|
||||
generator=generator,
|
||||
negative_prompt=n_prompt
|
||||
).images
|
||||
|
||||
output_frames[0].save(output_video_path, save_all=True,
|
||||
append_images=output_frames[1:], duration=100, loop=0)
|
||||
|
||||
```
|
||||
|
||||
# Perturbed-Attention Guidance
|
||||
|
||||
[Project](https://ku-cvlab.github.io/Perturbed-Attention-Guidance/) / [arXiv](https://arxiv.org/abs/2403.17377) / [GitHub](https://github.com/KU-CVLAB/Perturbed-Attention-Guidance)
|
||||
@@ -4043,7 +4131,7 @@ This implementation is based on [Diffusers](https://huggingface.co/docs/diffuser
|
||||
|
||||
## Example Usage
|
||||
|
||||
```
|
||||
```py
|
||||
import os
|
||||
import torch
|
||||
|
||||
|
||||
File diff suppressed because it is too large
Load Diff
@@ -565,7 +565,7 @@ class LCMSchedulerWithTimestamp(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
# Rescale for zero SNR
|
||||
if rescale_betas_zero_snr:
|
||||
|
||||
@@ -477,7 +477,7 @@ class LCMScheduler(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
# Rescale for zero SNR
|
||||
if rescale_betas_zero_snr:
|
||||
|
||||
@@ -43,8 +43,7 @@ from diffusers.utils import BaseOutput, check_min_version
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.25.0")
|
||||
|
||||
check_min_version("0.28.0")
|
||||
|
||||
class MarigoldDepthOutput(BaseOutput):
|
||||
"""
|
||||
|
||||
@@ -218,7 +218,7 @@ class UFOGenScheduler(SchedulerMixin, ConfigMixin):
|
||||
betas = torch.linspace(-6, 6, num_train_timesteps)
|
||||
self.betas = torch.sigmoid(betas) * (beta_end - beta_start) + beta_start
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
# Rescale for zero SNR
|
||||
if rescale_betas_zero_snr:
|
||||
|
||||
@@ -73,7 +73,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -66,7 +66,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -79,7 +79,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -72,7 +72,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -78,7 +78,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -60,7 +60,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -60,7 +60,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = logging.getLogger(__name__)
|
||||
|
||||
|
||||
@@ -61,7 +61,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
if is_torch_npu_available():
|
||||
|
||||
@@ -63,7 +63,7 @@ from diffusers.utils.import_utils import is_xformers_available
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -63,7 +63,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -35,7 +35,7 @@ from diffusers.utils import check_min_version
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
# Cache compiled models across invocations of this script.
|
||||
cc.initialize_cache(os.path.expanduser("~/.cache/jax/compilation_cache"))
|
||||
|
||||
@@ -70,7 +70,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -78,7 +78,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -57,7 +57,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -60,7 +60,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -52,7 +52,7 @@ if is_wandb_available():
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
@@ -896,7 +896,6 @@ def main():
|
||||
images = []
|
||||
if args.validation_prompts is not None:
|
||||
logger.info("Running inference for collecting generated images...")
|
||||
pipeline = pipeline.to(accelerator.device)
|
||||
pipeline.torch_dtype = weight_dtype
|
||||
pipeline.set_progress_bar_config(disable=True)
|
||||
pipeline.enable_model_cpu_offload()
|
||||
|
||||
@@ -46,7 +46,7 @@ from diffusers.utils import check_min_version, is_wandb_available
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -46,7 +46,7 @@ from diffusers.utils import check_min_version, is_wandb_available
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -51,7 +51,7 @@ if is_wandb_available():
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -60,7 +60,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -57,7 +57,7 @@ if is_wandb_available():
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -49,7 +49,7 @@ from diffusers.utils import check_min_version
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = logging.getLogger(__name__)
|
||||
|
||||
|
||||
@@ -53,7 +53,7 @@ from diffusers.utils.torch_utils import is_compiled_module
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -65,7 +65,7 @@ from diffusers.utils.torch_utils import is_compiled_module
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
if is_torch_npu_available():
|
||||
|
||||
@@ -55,7 +55,7 @@ from diffusers.utils.torch_utils import is_compiled_module
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
if is_torch_npu_available():
|
||||
|
||||
@@ -81,7 +81,7 @@ else:
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -56,7 +56,7 @@ else:
|
||||
# ------------------------------------------------------------------------------
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = logging.getLogger(__name__)
|
||||
|
||||
|
||||
@@ -76,7 +76,7 @@ else:
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__)
|
||||
|
||||
|
||||
@@ -29,7 +29,7 @@ from diffusers.utils.import_utils import is_xformers_available
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -50,7 +50,7 @@ if is_wandb_available():
|
||||
import wandb
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.27.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -50,7 +50,7 @@ if is_wandb_available():
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -51,7 +51,7 @@ if is_wandb_available():
|
||||
|
||||
|
||||
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
|
||||
check_min_version("0.28.0.dev0")
|
||||
check_min_version("0.28.0")
|
||||
|
||||
logger = get_logger(__name__, log_level="INFO")
|
||||
|
||||
|
||||
@@ -254,7 +254,7 @@ version_range_max = max(sys.version_info[1], 10) + 1
|
||||
|
||||
setup(
|
||||
name="diffusers",
|
||||
version="0.28.0.dev0", # expected format is one of x.y.z.dev0, or x.y.z.rc1 or x.y.z (no to dashes, yes to dots)
|
||||
version="0.28.2", # expected format is one of x.y.z.dev0, or x.y.z.rc1 or x.y.z (no to dashes, yes to dots)
|
||||
description="State-of-the-art diffusion in PyTorch and JAX.",
|
||||
long_description=open("README.md", "r", encoding="utf-8").read(),
|
||||
long_description_content_type="text/markdown",
|
||||
|
||||
@@ -1,4 +1,4 @@
|
||||
__version__ = "0.28.0.dev0"
|
||||
__version__ = "0.28.2"
|
||||
|
||||
from typing import TYPE_CHECKING
|
||||
|
||||
@@ -82,11 +82,14 @@ else:
|
||||
"ConsistencyDecoderVAE",
|
||||
"ControlNetModel",
|
||||
"ControlNetXSAdapter",
|
||||
"DiTTransformer2DModel",
|
||||
"HunyuanDiT2DModel",
|
||||
"I2VGenXLUNet",
|
||||
"Kandinsky3UNet",
|
||||
"ModelMixin",
|
||||
"MotionAdapter",
|
||||
"MultiAdapter",
|
||||
"PixArtTransformer2DModel",
|
||||
"PriorTransformer",
|
||||
"StableCascadeUNet",
|
||||
"T2IAdapter",
|
||||
@@ -227,6 +230,7 @@ else:
|
||||
"BlipDiffusionPipeline",
|
||||
"CLIPImageProjection",
|
||||
"CycleDiffusionPipeline",
|
||||
"HunyuanDiTPipeline",
|
||||
"I2VGenXLPipeline",
|
||||
"IFImg2ImgPipeline",
|
||||
"IFImg2ImgSuperResolutionPipeline",
|
||||
@@ -259,6 +263,8 @@ else:
|
||||
"LDMTextToImagePipeline",
|
||||
"LEditsPPPipelineStableDiffusion",
|
||||
"LEditsPPPipelineStableDiffusionXL",
|
||||
"MarigoldDepthPipeline",
|
||||
"MarigoldNormalsPipeline",
|
||||
"MusicLDMPipeline",
|
||||
"PaintByExamplePipeline",
|
||||
"PIAPipeline",
|
||||
@@ -482,11 +488,14 @@ if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
|
||||
ConsistencyDecoderVAE,
|
||||
ControlNetModel,
|
||||
ControlNetXSAdapter,
|
||||
DiTTransformer2DModel,
|
||||
HunyuanDiT2DModel,
|
||||
I2VGenXLUNet,
|
||||
Kandinsky3UNet,
|
||||
ModelMixin,
|
||||
MotionAdapter,
|
||||
MultiAdapter,
|
||||
PixArtTransformer2DModel,
|
||||
PriorTransformer,
|
||||
T2IAdapter,
|
||||
T5FilmDecoder,
|
||||
@@ -605,6 +614,7 @@ if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
|
||||
AudioLDMPipeline,
|
||||
CLIPImageProjection,
|
||||
CycleDiffusionPipeline,
|
||||
HunyuanDiTPipeline,
|
||||
I2VGenXLPipeline,
|
||||
IFImg2ImgPipeline,
|
||||
IFImg2ImgSuperResolutionPipeline,
|
||||
@@ -637,6 +647,8 @@ if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
|
||||
LDMTextToImagePipeline,
|
||||
LEditsPPPipelineStableDiffusion,
|
||||
LEditsPPPipelineStableDiffusionXL,
|
||||
MarigoldDepthPipeline,
|
||||
MarigoldNormalsPipeline,
|
||||
MusicLDMPipeline,
|
||||
PaintByExamplePipeline,
|
||||
PIAPipeline,
|
||||
|
||||
@@ -31,6 +31,7 @@ from ..utils import (
|
||||
is_transformers_available,
|
||||
is_xformers_available,
|
||||
)
|
||||
from ..utils.testing_utils import get_python_version
|
||||
from . import BaseDiffusersCLICommand
|
||||
|
||||
|
||||
@@ -105,6 +106,11 @@ class EnvironmentCommand(BaseDiffusersCLICommand):
|
||||
|
||||
xformers_version = xformers.__version__
|
||||
|
||||
if get_python_version() >= (3, 10):
|
||||
platform_info = f"{platform.freedesktop_os_release().get('PRETTY_NAME', None)} - {platform.platform()}"
|
||||
else:
|
||||
platform_info = platform.platform()
|
||||
|
||||
is_notebook_str = "Yes" if is_notebook() else "No"
|
||||
|
||||
is_google_colab_str = "Yes" if is_google_colab() else "No"
|
||||
@@ -152,7 +158,7 @@ class EnvironmentCommand(BaseDiffusersCLICommand):
|
||||
|
||||
info = {
|
||||
"🤗 Diffusers version": version,
|
||||
"Platform": f"{platform.freedesktop_os_release().get('PRETTY_NAME', None)} - {platform.platform()}",
|
||||
"Platform": platform_info,
|
||||
"Running on a notebook?": is_notebook_str,
|
||||
"Running on Google Colab?": is_google_colab_str,
|
||||
"Python version": platform.python_version(),
|
||||
|
||||
@@ -706,3 +706,20 @@ def flax_register_to_config(cls):
|
||||
|
||||
cls.__init__ = init
|
||||
return cls
|
||||
|
||||
|
||||
class LegacyConfigMixin(ConfigMixin):
|
||||
r"""
|
||||
A subclass of `ConfigMixin` to resolve class mapping from legacy classes (like `Transformer2DModel`) to more
|
||||
pipeline-specific classes (like `DiTTransformer2DModel`).
|
||||
"""
|
||||
|
||||
@classmethod
|
||||
def from_config(cls, config: Union[FrozenDict, Dict[str, Any]] = None, return_unused_kwargs=False, **kwargs):
|
||||
# To prevent depedency import problem.
|
||||
from .models.model_loading_utils import _fetch_remapped_cls_from_config
|
||||
|
||||
# resolve remapping
|
||||
remapped_class = _fetch_remapped_cls_from_config(config, cls)
|
||||
|
||||
return remapped_class.from_config(config, return_unused_kwargs, **kwargs)
|
||||
|
||||
@@ -340,7 +340,7 @@ class FromSingleFileMixin:
|
||||
deprecate("original_config_file", "1.0.0", deprecation_message)
|
||||
original_config = original_config_file
|
||||
|
||||
resume_download = kwargs.pop("resume_download", False)
|
||||
resume_download = kwargs.pop("resume_download", None)
|
||||
force_download = kwargs.pop("force_download", False)
|
||||
proxies = kwargs.pop("proxies", None)
|
||||
token = kwargs.pop("token", None)
|
||||
|
||||
@@ -166,7 +166,7 @@ class FromOriginalModelMixin:
|
||||
"`from_single_file` cannot accept both `config` and `original_config` arguments. Please provide only one of these arguments"
|
||||
)
|
||||
|
||||
resume_download = kwargs.pop("resume_download", False)
|
||||
resume_download = kwargs.pop("resume_download", None)
|
||||
force_download = kwargs.pop("force_download", False)
|
||||
proxies = kwargs.pop("proxies", None)
|
||||
token = kwargs.pop("token", None)
|
||||
|
||||
@@ -63,7 +63,7 @@ CHECKPOINT_KEY_NAMES = {
|
||||
"controlnet": "control_model.time_embed.0.weight",
|
||||
"playground-v2-5": "edm_mean",
|
||||
"inpainting": "model.diffusion_model.input_blocks.0.0.weight",
|
||||
"clip": "cond_stage_model.transformer.text_model.embeddings.position_ids",
|
||||
"clip": "cond_stage_model.transformer.text_model.embeddings.position_embedding.weight",
|
||||
"clip_sdxl": "conditioner.embedders.0.transformer.text_model.embeddings.position_embedding.weight",
|
||||
"open_clip": "cond_stage_model.model.token_embedding.weight",
|
||||
"open_clip_sdxl": "conditioner.embedders.1.model.positional_embedding",
|
||||
|
||||
@@ -36,6 +36,9 @@ if is_torch_available():
|
||||
_import_structure["dual_transformer_2d"] = ["DualTransformer2DModel"]
|
||||
_import_structure["embeddings"] = ["ImageProjection"]
|
||||
_import_structure["modeling_utils"] = ["ModelMixin"]
|
||||
_import_structure["transformers.dit_transformer_2d"] = ["DiTTransformer2DModel"]
|
||||
_import_structure["transformers.hunyuan_transformer_2d"] = ["HunyuanDiT2DModel"]
|
||||
_import_structure["transformers.pixart_transformer_2d"] = ["PixArtTransformer2DModel"]
|
||||
_import_structure["transformers.prior_transformer"] = ["PriorTransformer"]
|
||||
_import_structure["transformers.t5_film_transformer"] = ["T5FilmDecoder"]
|
||||
_import_structure["transformers.transformer_2d"] = ["Transformer2DModel"]
|
||||
@@ -73,7 +76,10 @@ if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
|
||||
from .embeddings import ImageProjection
|
||||
from .modeling_utils import ModelMixin
|
||||
from .transformers import (
|
||||
DiTTransformer2DModel,
|
||||
DualTransformer2DModel,
|
||||
HunyuanDiT2DModel,
|
||||
PixArtTransformer2DModel,
|
||||
PriorTransformer,
|
||||
T5FilmDecoder,
|
||||
Transformer2DModel,
|
||||
|
||||
@@ -50,6 +50,18 @@ def get_activation(act_fn: str) -> nn.Module:
|
||||
raise ValueError(f"Unsupported activation function: {act_fn}")
|
||||
|
||||
|
||||
class FP32SiLU(nn.Module):
|
||||
r"""
|
||||
SiLU activation function with input upcasted to torch.float32.
|
||||
"""
|
||||
|
||||
def __init__(self):
|
||||
super().__init__()
|
||||
|
||||
def forward(self, inputs: torch.Tensor) -> torch.Tensor:
|
||||
return F.silu(inputs.float(), inplace=False).to(inputs.dtype)
|
||||
|
||||
|
||||
class GELU(nn.Module):
|
||||
r"""
|
||||
GELU activation function with tanh approximation support with `approximate="tanh"`.
|
||||
|
||||
@@ -103,6 +103,7 @@ class Attention(nn.Module):
|
||||
upcast_softmax: bool = False,
|
||||
cross_attention_norm: Optional[str] = None,
|
||||
cross_attention_norm_num_groups: int = 32,
|
||||
qk_norm: Optional[str] = None,
|
||||
added_kv_proj_dim: Optional[int] = None,
|
||||
norm_num_groups: Optional[int] = None,
|
||||
spatial_norm_dim: Optional[int] = None,
|
||||
@@ -161,6 +162,15 @@ class Attention(nn.Module):
|
||||
else:
|
||||
self.spatial_norm = None
|
||||
|
||||
if qk_norm is None:
|
||||
self.norm_q = None
|
||||
self.norm_k = None
|
||||
elif qk_norm == "layer_norm":
|
||||
self.norm_q = nn.LayerNorm(dim_head, eps=eps)
|
||||
self.norm_k = nn.LayerNorm(dim_head, eps=eps)
|
||||
else:
|
||||
raise ValueError(f"unknown qk_norm: {qk_norm}. Should be None or 'layer_norm'")
|
||||
|
||||
if cross_attention_norm is None:
|
||||
self.norm_cross = None
|
||||
elif cross_attention_norm == "layer_norm":
|
||||
@@ -1426,6 +1436,104 @@ class AttnProcessor2_0:
|
||||
return hidden_states
|
||||
|
||||
|
||||
class HunyuanAttnProcessor2_0:
|
||||
r"""
|
||||
Processor for implementing scaled dot-product attention (enabled by default if you're using PyTorch 2.0). This is
|
||||
used in the HunyuanDiT model. It applies a s normalization layer and rotary embedding on query and key vector.
|
||||
"""
|
||||
|
||||
def __init__(self):
|
||||
if not hasattr(F, "scaled_dot_product_attention"):
|
||||
raise ImportError("AttnProcessor2_0 requires PyTorch 2.0, to use it, please upgrade PyTorch to 2.0.")
|
||||
|
||||
def __call__(
|
||||
self,
|
||||
attn: Attention,
|
||||
hidden_states: torch.Tensor,
|
||||
encoder_hidden_states: Optional[torch.Tensor] = None,
|
||||
attention_mask: Optional[torch.Tensor] = None,
|
||||
temb: Optional[torch.Tensor] = None,
|
||||
image_rotary_emb: Optional[torch.Tensor] = None,
|
||||
) -> torch.Tensor:
|
||||
from .embeddings import apply_rotary_emb
|
||||
|
||||
residual = hidden_states
|
||||
if attn.spatial_norm is not None:
|
||||
hidden_states = attn.spatial_norm(hidden_states, temb)
|
||||
|
||||
input_ndim = hidden_states.ndim
|
||||
|
||||
if input_ndim == 4:
|
||||
batch_size, channel, height, width = hidden_states.shape
|
||||
hidden_states = hidden_states.view(batch_size, channel, height * width).transpose(1, 2)
|
||||
|
||||
batch_size, sequence_length, _ = (
|
||||
hidden_states.shape if encoder_hidden_states is None else encoder_hidden_states.shape
|
||||
)
|
||||
|
||||
if attention_mask is not None:
|
||||
attention_mask = attn.prepare_attention_mask(attention_mask, sequence_length, batch_size)
|
||||
# scaled_dot_product_attention expects attention_mask shape to be
|
||||
# (batch, heads, source_length, target_length)
|
||||
attention_mask = attention_mask.view(batch_size, attn.heads, -1, attention_mask.shape[-1])
|
||||
|
||||
if attn.group_norm is not None:
|
||||
hidden_states = attn.group_norm(hidden_states.transpose(1, 2)).transpose(1, 2)
|
||||
|
||||
query = attn.to_q(hidden_states)
|
||||
|
||||
if encoder_hidden_states is None:
|
||||
encoder_hidden_states = hidden_states
|
||||
elif attn.norm_cross:
|
||||
encoder_hidden_states = attn.norm_encoder_hidden_states(encoder_hidden_states)
|
||||
|
||||
key = attn.to_k(encoder_hidden_states)
|
||||
value = attn.to_v(encoder_hidden_states)
|
||||
|
||||
inner_dim = key.shape[-1]
|
||||
head_dim = inner_dim // attn.heads
|
||||
|
||||
query = query.view(batch_size, -1, attn.heads, head_dim).transpose(1, 2)
|
||||
|
||||
key = key.view(batch_size, -1, attn.heads, head_dim).transpose(1, 2)
|
||||
value = value.view(batch_size, -1, attn.heads, head_dim).transpose(1, 2)
|
||||
|
||||
if attn.norm_q is not None:
|
||||
query = attn.norm_q(query)
|
||||
if attn.norm_k is not None:
|
||||
key = attn.norm_k(key)
|
||||
|
||||
# Apply RoPE if needed
|
||||
if image_rotary_emb is not None:
|
||||
query = apply_rotary_emb(query, image_rotary_emb)
|
||||
if not attn.is_cross_attention:
|
||||
key = apply_rotary_emb(key, image_rotary_emb)
|
||||
|
||||
# the output of sdp = (batch, num_heads, seq_len, head_dim)
|
||||
# TODO: add support for attn.scale when we move to Torch 2.1
|
||||
hidden_states = F.scaled_dot_product_attention(
|
||||
query, key, value, attn_mask=attention_mask, dropout_p=0.0, is_causal=False
|
||||
)
|
||||
|
||||
hidden_states = hidden_states.transpose(1, 2).reshape(batch_size, -1, attn.heads * head_dim)
|
||||
hidden_states = hidden_states.to(query.dtype)
|
||||
|
||||
# linear proj
|
||||
hidden_states = attn.to_out[0](hidden_states)
|
||||
# dropout
|
||||
hidden_states = attn.to_out[1](hidden_states)
|
||||
|
||||
if input_ndim == 4:
|
||||
hidden_states = hidden_states.transpose(-1, -2).reshape(batch_size, channel, height, width)
|
||||
|
||||
if attn.residual_connection:
|
||||
hidden_states = hidden_states + residual
|
||||
|
||||
hidden_states = hidden_states / attn.rescale_output_factor
|
||||
|
||||
return hidden_states
|
||||
|
||||
|
||||
class FusedAttnProcessor2_0:
|
||||
r"""
|
||||
Processor for implementing scaled dot-product attention (enabled by default if you're using PyTorch 2.0). It uses
|
||||
|
||||
@@ -16,10 +16,11 @@ from typing import List, Optional, Tuple, Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
from torch import nn
|
||||
|
||||
from ..utils import deprecate
|
||||
from .activations import get_activation
|
||||
from .activations import FP32SiLU, get_activation
|
||||
from .attention_processor import Attention
|
||||
|
||||
|
||||
@@ -135,6 +136,7 @@ class PatchEmbed(nn.Module):
|
||||
flatten=True,
|
||||
bias=True,
|
||||
interpolation_scale=1,
|
||||
pos_embed_type="sincos",
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
@@ -156,10 +158,18 @@ class PatchEmbed(nn.Module):
|
||||
self.height, self.width = height // patch_size, width // patch_size
|
||||
self.base_size = height // patch_size
|
||||
self.interpolation_scale = interpolation_scale
|
||||
pos_embed = get_2d_sincos_pos_embed(
|
||||
embed_dim, int(num_patches**0.5), base_size=self.base_size, interpolation_scale=self.interpolation_scale
|
||||
)
|
||||
self.register_buffer("pos_embed", torch.from_numpy(pos_embed).float().unsqueeze(0), persistent=False)
|
||||
if pos_embed_type is None:
|
||||
self.pos_embed = None
|
||||
elif pos_embed_type == "sincos":
|
||||
pos_embed = get_2d_sincos_pos_embed(
|
||||
embed_dim,
|
||||
int(num_patches**0.5),
|
||||
base_size=self.base_size,
|
||||
interpolation_scale=self.interpolation_scale,
|
||||
)
|
||||
self.register_buffer("pos_embed", torch.from_numpy(pos_embed).float().unsqueeze(0), persistent=False)
|
||||
else:
|
||||
raise ValueError(f"Unsupported pos_embed_type: {pos_embed_type}")
|
||||
|
||||
def forward(self, latent):
|
||||
height, width = latent.shape[-2] // self.patch_size, latent.shape[-1] // self.patch_size
|
||||
@@ -169,6 +179,8 @@ class PatchEmbed(nn.Module):
|
||||
latent = latent.flatten(2).transpose(1, 2) # BCHW -> BNC
|
||||
if self.layer_norm:
|
||||
latent = self.norm(latent)
|
||||
if self.pos_embed is None:
|
||||
return latent.to(latent.dtype)
|
||||
|
||||
# Interpolate positional embeddings if needed.
|
||||
# (For PixArt-Alpha: https://github.com/PixArt-alpha/PixArt-alpha/blob/0f55e922376d8b797edd44d25d0e7464b260dcab/diffusion/model/nets/PixArtMS.py#L162C151-L162C160)
|
||||
@@ -187,6 +199,113 @@ class PatchEmbed(nn.Module):
|
||||
return (latent + pos_embed).to(latent.dtype)
|
||||
|
||||
|
||||
def get_2d_rotary_pos_embed(embed_dim, crops_coords, grid_size, use_real=True):
|
||||
"""
|
||||
RoPE for image tokens with 2d structure.
|
||||
|
||||
Args:
|
||||
embed_dim: (`int`):
|
||||
The embedding dimension size
|
||||
crops_coords (`Tuple[int]`)
|
||||
The top-left and bottom-right coordinates of the crop.
|
||||
grid_size (`Tuple[int]`):
|
||||
The grid size of the positional embedding.
|
||||
use_real (`bool`):
|
||||
If True, return real part and imaginary part separately. Otherwise, return complex numbers.
|
||||
|
||||
Returns:
|
||||
`torch.Tensor`: positional embdding with shape `( grid_size * grid_size, embed_dim/2)`.
|
||||
"""
|
||||
start, stop = crops_coords
|
||||
grid_h = np.linspace(start[0], stop[0], grid_size[0], endpoint=False, dtype=np.float32)
|
||||
grid_w = np.linspace(start[1], stop[1], grid_size[1], endpoint=False, dtype=np.float32)
|
||||
grid = np.meshgrid(grid_w, grid_h) # here w goes first
|
||||
grid = np.stack(grid, axis=0) # [2, W, H]
|
||||
|
||||
grid = grid.reshape([2, 1, *grid.shape[1:]])
|
||||
pos_embed = get_2d_rotary_pos_embed_from_grid(embed_dim, grid, use_real=use_real)
|
||||
return pos_embed
|
||||
|
||||
|
||||
def get_2d_rotary_pos_embed_from_grid(embed_dim, grid, use_real=False):
|
||||
assert embed_dim % 4 == 0
|
||||
|
||||
# use half of dimensions to encode grid_h
|
||||
emb_h = get_1d_rotary_pos_embed(embed_dim // 2, grid[0].reshape(-1), use_real=use_real) # (H*W, D/4)
|
||||
emb_w = get_1d_rotary_pos_embed(embed_dim // 2, grid[1].reshape(-1), use_real=use_real) # (H*W, D/4)
|
||||
|
||||
if use_real:
|
||||
cos = torch.cat([emb_h[0], emb_w[0]], dim=1) # (H*W, D/2)
|
||||
sin = torch.cat([emb_h[1], emb_w[1]], dim=1) # (H*W, D/2)
|
||||
return cos, sin
|
||||
else:
|
||||
emb = torch.cat([emb_h, emb_w], dim=1) # (H*W, D/2)
|
||||
return emb
|
||||
|
||||
|
||||
def get_1d_rotary_pos_embed(dim: int, pos: Union[np.ndarray, int], theta: float = 10000.0, use_real=False):
|
||||
"""
|
||||
Precompute the frequency tensor for complex exponentials (cis) with given dimensions.
|
||||
|
||||
This function calculates a frequency tensor with complex exponentials using the given dimension 'dim' and the end
|
||||
index 'end'. The 'theta' parameter scales the frequencies. The returned tensor contains complex values in complex64
|
||||
data type.
|
||||
|
||||
Args:
|
||||
dim (`int`): Dimension of the frequency tensor.
|
||||
pos (`np.ndarray` or `int`): Position indices for the frequency tensor. [S] or scalar
|
||||
theta (`float`, *optional*, defaults to 10000.0):
|
||||
Scaling factor for frequency computation. Defaults to 10000.0.
|
||||
use_real (`bool`, *optional*):
|
||||
If True, return real part and imaginary part separately. Otherwise, return complex numbers.
|
||||
|
||||
Returns:
|
||||
`torch.Tensor`: Precomputed frequency tensor with complex exponentials. [S, D/2]
|
||||
"""
|
||||
if isinstance(pos, int):
|
||||
pos = np.arange(pos)
|
||||
freqs = 1.0 / (theta ** (torch.arange(0, dim, 2)[: (dim // 2)].float() / dim)) # [D/2]
|
||||
t = torch.from_numpy(pos).to(freqs.device) # type: ignore # [S]
|
||||
freqs = torch.outer(t, freqs).float() # type: ignore # [S, D/2]
|
||||
if use_real:
|
||||
freqs_cos = freqs.cos().repeat_interleave(2, dim=1) # [S, D]
|
||||
freqs_sin = freqs.sin().repeat_interleave(2, dim=1) # [S, D]
|
||||
return freqs_cos, freqs_sin
|
||||
else:
|
||||
freqs_cis = torch.polar(torch.ones_like(freqs), freqs) # complex64 # [S, D/2]
|
||||
return freqs_cis
|
||||
|
||||
|
||||
def apply_rotary_emb(
|
||||
x: torch.Tensor,
|
||||
freqs_cis: Union[torch.Tensor, Tuple[torch.Tensor]],
|
||||
) -> Tuple[torch.Tensor, torch.Tensor]:
|
||||
"""
|
||||
Apply rotary embeddings to input tensors using the given frequency tensor. This function applies rotary embeddings
|
||||
to the given query or key 'x' tensors using the provided frequency tensor 'freqs_cis'. The input tensors are
|
||||
reshaped as complex numbers, and the frequency tensor is reshaped for broadcasting compatibility. The resulting
|
||||
tensors contain rotary embeddings and are returned as real tensors.
|
||||
|
||||
Args:
|
||||
x (`torch.Tensor`):
|
||||
Query or key tensor to apply rotary embeddings. [B, H, S, D] xk (torch.Tensor): Key tensor to apply
|
||||
freqs_cis (`Tuple[torch.Tensor]`): Precomputed frequency tensor for complex exponentials. ([S, D], [S, D],)
|
||||
|
||||
Returns:
|
||||
Tuple[torch.Tensor, torch.Tensor]: Tuple of modified query tensor and key tensor with rotary embeddings.
|
||||
"""
|
||||
cos, sin = freqs_cis # [S, D]
|
||||
cos = cos[None, None]
|
||||
sin = sin[None, None]
|
||||
cos, sin = cos.to(x.device), sin.to(x.device)
|
||||
|
||||
x_real, x_imag = x.reshape(*x.shape[:-1], -1, 2).unbind(-1) # [B, S, H, D//2]
|
||||
x_rotated = torch.stack([-x_imag, x_real], dim=-1).flatten(3)
|
||||
out = (x.float() * cos + x_rotated.float() * sin).to(x.dtype)
|
||||
|
||||
return out
|
||||
|
||||
|
||||
class TimestepEmbedding(nn.Module):
|
||||
def __init__(
|
||||
self,
|
||||
@@ -507,6 +626,88 @@ class CombinedTimestepLabelEmbeddings(nn.Module):
|
||||
return conditioning
|
||||
|
||||
|
||||
class HunyuanDiTAttentionPool(nn.Module):
|
||||
# Copied from https://github.com/Tencent/HunyuanDiT/blob/cb709308d92e6c7e8d59d0dff41b74d35088db6a/hydit/modules/poolers.py#L6
|
||||
|
||||
def __init__(self, spacial_dim: int, embed_dim: int, num_heads: int, output_dim: int = None):
|
||||
super().__init__()
|
||||
self.positional_embedding = nn.Parameter(torch.randn(spacial_dim + 1, embed_dim) / embed_dim**0.5)
|
||||
self.k_proj = nn.Linear(embed_dim, embed_dim)
|
||||
self.q_proj = nn.Linear(embed_dim, embed_dim)
|
||||
self.v_proj = nn.Linear(embed_dim, embed_dim)
|
||||
self.c_proj = nn.Linear(embed_dim, output_dim or embed_dim)
|
||||
self.num_heads = num_heads
|
||||
|
||||
def forward(self, x):
|
||||
x = x.permute(1, 0, 2) # NLC -> LNC
|
||||
x = torch.cat([x.mean(dim=0, keepdim=True), x], dim=0) # (L+1)NC
|
||||
x = x + self.positional_embedding[:, None, :].to(x.dtype) # (L+1)NC
|
||||
x, _ = F.multi_head_attention_forward(
|
||||
query=x[:1],
|
||||
key=x,
|
||||
value=x,
|
||||
embed_dim_to_check=x.shape[-1],
|
||||
num_heads=self.num_heads,
|
||||
q_proj_weight=self.q_proj.weight,
|
||||
k_proj_weight=self.k_proj.weight,
|
||||
v_proj_weight=self.v_proj.weight,
|
||||
in_proj_weight=None,
|
||||
in_proj_bias=torch.cat([self.q_proj.bias, self.k_proj.bias, self.v_proj.bias]),
|
||||
bias_k=None,
|
||||
bias_v=None,
|
||||
add_zero_attn=False,
|
||||
dropout_p=0,
|
||||
out_proj_weight=self.c_proj.weight,
|
||||
out_proj_bias=self.c_proj.bias,
|
||||
use_separate_proj_weight=True,
|
||||
training=self.training,
|
||||
need_weights=False,
|
||||
)
|
||||
return x.squeeze(0)
|
||||
|
||||
|
||||
class HunyuanCombinedTimestepTextSizeStyleEmbedding(nn.Module):
|
||||
def __init__(self, embedding_dim, pooled_projection_dim=1024, seq_len=256, cross_attention_dim=2048):
|
||||
super().__init__()
|
||||
|
||||
self.time_proj = Timesteps(num_channels=256, flip_sin_to_cos=True, downscale_freq_shift=0)
|
||||
self.timestep_embedder = TimestepEmbedding(in_channels=256, time_embed_dim=embedding_dim)
|
||||
|
||||
self.pooler = HunyuanDiTAttentionPool(
|
||||
seq_len, cross_attention_dim, num_heads=8, output_dim=pooled_projection_dim
|
||||
)
|
||||
# Here we use a default learned embedder layer for future extension.
|
||||
self.style_embedder = nn.Embedding(1, embedding_dim)
|
||||
extra_in_dim = 256 * 6 + embedding_dim + pooled_projection_dim
|
||||
self.extra_embedder = PixArtAlphaTextProjection(
|
||||
in_features=extra_in_dim,
|
||||
hidden_size=embedding_dim * 4,
|
||||
out_features=embedding_dim,
|
||||
act_fn="silu_fp32",
|
||||
)
|
||||
|
||||
def forward(self, timestep, encoder_hidden_states, image_meta_size, style, hidden_dtype=None):
|
||||
timesteps_proj = self.time_proj(timestep)
|
||||
timesteps_emb = self.timestep_embedder(timesteps_proj.to(dtype=hidden_dtype)) # (N, 256)
|
||||
|
||||
# extra condition1: text
|
||||
pooled_projections = self.pooler(encoder_hidden_states) # (N, 1024)
|
||||
|
||||
# extra condition2: image meta size embdding
|
||||
image_meta_size = get_timestep_embedding(image_meta_size.view(-1), 256, True, 0)
|
||||
image_meta_size = image_meta_size.to(dtype=hidden_dtype)
|
||||
image_meta_size = image_meta_size.view(-1, 6 * 256) # (N, 1536)
|
||||
|
||||
# extra condition3: style embedding
|
||||
style_embedding = self.style_embedder(style) # (N, embedding_dim)
|
||||
|
||||
# Concatenate all extra vectors
|
||||
extra_cond = torch.cat([pooled_projections, image_meta_size, style_embedding], dim=1)
|
||||
conditioning = timesteps_emb + self.extra_embedder(extra_cond) # [B, D]
|
||||
|
||||
return conditioning
|
||||
|
||||
|
||||
class TextTimeEmbedding(nn.Module):
|
||||
def __init__(self, encoder_dim: int, time_embed_dim: int, num_heads: int = 64):
|
||||
super().__init__()
|
||||
@@ -793,11 +994,18 @@ class PixArtAlphaTextProjection(nn.Module):
|
||||
Adapted from https://github.com/PixArt-alpha/PixArt-alpha/blob/master/diffusion/model/nets/PixArt_blocks.py
|
||||
"""
|
||||
|
||||
def __init__(self, in_features, hidden_size, num_tokens=120):
|
||||
def __init__(self, in_features, hidden_size, out_features=None, act_fn="gelu_tanh"):
|
||||
super().__init__()
|
||||
if out_features is None:
|
||||
out_features = hidden_size
|
||||
self.linear_1 = nn.Linear(in_features=in_features, out_features=hidden_size, bias=True)
|
||||
self.act_1 = nn.GELU(approximate="tanh")
|
||||
self.linear_2 = nn.Linear(in_features=hidden_size, out_features=hidden_size, bias=True)
|
||||
if act_fn == "gelu_tanh":
|
||||
self.act_1 = nn.GELU(approximate="tanh")
|
||||
elif act_fn == "silu_fp32":
|
||||
self.act_1 = FP32SiLU()
|
||||
else:
|
||||
raise ValueError(f"Unknown activation function: {act_fn}")
|
||||
self.linear_2 = nn.Linear(in_features=hidden_size, out_features=out_features, bias=True)
|
||||
|
||||
def forward(self, caption):
|
||||
hidden_states = self.linear_1(caption)
|
||||
|
||||
@@ -14,6 +14,7 @@
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import importlib
|
||||
import inspect
|
||||
import os
|
||||
from collections import OrderedDict
|
||||
@@ -32,6 +33,13 @@ from ..utils import (
|
||||
|
||||
logger = logging.get_logger(__name__)
|
||||
|
||||
_CLASS_REMAPPING_DICT = {
|
||||
"Transformer2DModel": {
|
||||
"ada_norm_zero": "DiTTransformer2DModel",
|
||||
"ada_norm_single": "PixArtTransformer2DModel",
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
if is_accelerate_available():
|
||||
from accelerate import infer_auto_device_map
|
||||
@@ -61,6 +69,26 @@ def _determine_device_map(model: torch.nn.Module, device_map, max_memory, torch_
|
||||
return device_map
|
||||
|
||||
|
||||
def _fetch_remapped_cls_from_config(config, old_class):
|
||||
previous_class_name = old_class.__name__
|
||||
remapped_class_name = _CLASS_REMAPPING_DICT.get(previous_class_name).get(config["norm_type"], None)
|
||||
|
||||
# Details:
|
||||
# https://github.com/huggingface/diffusers/pull/7647#discussion_r1621344818
|
||||
if remapped_class_name:
|
||||
# load diffusers library to import compatible and original scheduler
|
||||
diffusers_library = importlib.import_module(__name__.split(".")[0])
|
||||
remapped_class = getattr(diffusers_library, remapped_class_name)
|
||||
logger.info(
|
||||
f"Changing class object to be of `{remapped_class_name}` type from `{previous_class_name}` type."
|
||||
f"This is because `{previous_class_name}` is scheduled to be deprecated in a future version. Note that this"
|
||||
" DOESN'T affect the final results."
|
||||
)
|
||||
return remapped_class
|
||||
else:
|
||||
return old_class
|
||||
|
||||
|
||||
def load_state_dict(checkpoint_file: Union[str, os.PathLike], variant: Optional[str] = None):
|
||||
"""
|
||||
Reads a checkpoint file, returning properly formatted errors if they arise.
|
||||
|
||||
@@ -15,3 +15,17 @@ class AutoencoderKLOutput(BaseOutput):
|
||||
"""
|
||||
|
||||
latent_dist: "DiagonalGaussianDistribution" # noqa: F821
|
||||
|
||||
|
||||
@dataclass
|
||||
class Transformer2DModelOutput(BaseOutput):
|
||||
"""
|
||||
The output of [`Transformer2DModel`].
|
||||
|
||||
Args:
|
||||
sample (`torch.Tensor` of shape `(batch_size, num_channels, height, width)` or `(batch size, num_vector_embeds - 1, num_latent_pixels)` if [`Transformer2DModel`] is discrete):
|
||||
The hidden states output conditioned on the `encoder_hidden_states` input. If discrete, returns probability
|
||||
distributions for the unnoised latent pixels.
|
||||
"""
|
||||
|
||||
sample: "torch.Tensor" # noqa: F821
|
||||
|
||||
@@ -42,7 +42,11 @@ from ..utils import (
|
||||
is_torch_version,
|
||||
logging,
|
||||
)
|
||||
from ..utils.hub_utils import PushToHubMixin, load_or_create_model_card, populate_model_card
|
||||
from ..utils.hub_utils import (
|
||||
PushToHubMixin,
|
||||
load_or_create_model_card,
|
||||
populate_model_card,
|
||||
)
|
||||
from .model_loading_utils import (
|
||||
_determine_device_map,
|
||||
_load_state_dict_into_model,
|
||||
@@ -1039,3 +1043,55 @@ class ModelMixin(torch.nn.Module, PushToHubMixin):
|
||||
del module.key
|
||||
del module.value
|
||||
del module.proj_attn
|
||||
|
||||
|
||||
class LegacyModelMixin(ModelMixin):
|
||||
r"""
|
||||
A subclass of `ModelMixin` to resolve class mapping from legacy classes (like `Transformer2DModel`) to more
|
||||
pipeline-specific classes (like `DiTTransformer2DModel`).
|
||||
"""
|
||||
|
||||
@classmethod
|
||||
@validate_hf_hub_args
|
||||
def from_pretrained(cls, pretrained_model_name_or_path: Optional[Union[str, os.PathLike]], **kwargs):
|
||||
# To prevent depedency import problem.
|
||||
from .model_loading_utils import _fetch_remapped_cls_from_config
|
||||
|
||||
cache_dir = kwargs.pop("cache_dir", None)
|
||||
force_download = kwargs.pop("force_download", False)
|
||||
resume_download = kwargs.pop("resume_download", None)
|
||||
proxies = kwargs.pop("proxies", None)
|
||||
local_files_only = kwargs.pop("local_files_only", None)
|
||||
token = kwargs.pop("token", None)
|
||||
revision = kwargs.pop("revision", None)
|
||||
subfolder = kwargs.pop("subfolder", None)
|
||||
|
||||
# Load config if we don't provide a configuration
|
||||
config_path = pretrained_model_name_or_path
|
||||
|
||||
user_agent = {
|
||||
"diffusers": __version__,
|
||||
"file_type": "model",
|
||||
"framework": "pytorch",
|
||||
}
|
||||
|
||||
# load config
|
||||
config, _, _ = cls.load_config(
|
||||
config_path,
|
||||
cache_dir=cache_dir,
|
||||
return_unused_kwargs=True,
|
||||
return_commit_hash=True,
|
||||
force_download=force_download,
|
||||
resume_download=resume_download,
|
||||
proxies=proxies,
|
||||
local_files_only=local_files_only,
|
||||
token=token,
|
||||
revision=revision,
|
||||
subfolder=subfolder,
|
||||
user_agent=user_agent,
|
||||
**kwargs,
|
||||
)
|
||||
# resolve remapping
|
||||
remapped_class = _fetch_remapped_cls_from_config(config, cls)
|
||||
|
||||
return remapped_class.from_pretrained(pretrained_model_name_or_path, **kwargs)
|
||||
|
||||
@@ -176,7 +176,8 @@ class AdaLayerNormContinuous(nn.Module):
|
||||
raise ValueError(f"unknown norm_type {norm_type}")
|
||||
|
||||
def forward(self, x: torch.Tensor, conditioning_embedding: torch.Tensor) -> torch.Tensor:
|
||||
emb = self.linear(self.silu(conditioning_embedding))
|
||||
# convert back to the original dtype in case `conditioning_embedding`` is upcasted to float32 (needed for hunyuanDiT)
|
||||
emb = self.linear(self.silu(conditioning_embedding).to(x.dtype))
|
||||
scale, shift = torch.chunk(emb, 2, dim=1)
|
||||
x = self.norm(x) * (1 + scale)[:, None, :] + shift[:, None, :]
|
||||
return x
|
||||
|
||||
@@ -2,7 +2,10 @@ from ...utils import is_torch_available
|
||||
|
||||
|
||||
if is_torch_available():
|
||||
from .dit_transformer_2d import DiTTransformer2DModel
|
||||
from .dual_transformer_2d import DualTransformer2DModel
|
||||
from .hunyuan_transformer_2d import HunyuanDiT2DModel
|
||||
from .pixart_transformer_2d import PixArtTransformer2DModel
|
||||
from .prior_transformer import PriorTransformer
|
||||
from .t5_film_transformer import T5FilmDecoder
|
||||
from .transformer_2d import Transformer2DModel
|
||||
|
||||
@@ -0,0 +1,240 @@
|
||||
# Copyright 2024 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from typing import Any, Dict, Optional
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
from torch import nn
|
||||
|
||||
from ...configuration_utils import ConfigMixin, register_to_config
|
||||
from ...utils import is_torch_version, logging
|
||||
from ..attention import BasicTransformerBlock
|
||||
from ..embeddings import PatchEmbed
|
||||
from ..modeling_outputs import Transformer2DModelOutput
|
||||
from ..modeling_utils import ModelMixin
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
||||
|
||||
class DiTTransformer2DModel(ModelMixin, ConfigMixin):
|
||||
r"""
|
||||
A 2D Transformer model as introduced in DiT (https://arxiv.org/abs/2212.09748).
|
||||
|
||||
Parameters:
|
||||
num_attention_heads (int, optional, defaults to 16): The number of heads to use for multi-head attention.
|
||||
attention_head_dim (int, optional, defaults to 72): The number of channels in each head.
|
||||
in_channels (int, defaults to 4): The number of channels in the input.
|
||||
out_channels (int, optional):
|
||||
The number of channels in the output. Specify this parameter if the output channel number differs from the
|
||||
input.
|
||||
num_layers (int, optional, defaults to 28): The number of layers of Transformer blocks to use.
|
||||
dropout (float, optional, defaults to 0.0): The dropout probability to use within the Transformer blocks.
|
||||
norm_num_groups (int, optional, defaults to 32):
|
||||
Number of groups for group normalization within Transformer blocks.
|
||||
attention_bias (bool, optional, defaults to True):
|
||||
Configure if the Transformer blocks' attention should contain a bias parameter.
|
||||
sample_size (int, defaults to 32):
|
||||
The width of the latent images. This parameter is fixed during training.
|
||||
patch_size (int, defaults to 2):
|
||||
Size of the patches the model processes, relevant for architectures working on non-sequential data.
|
||||
activation_fn (str, optional, defaults to "gelu-approximate"):
|
||||
Activation function to use in feed-forward networks within Transformer blocks.
|
||||
num_embeds_ada_norm (int, optional, defaults to 1000):
|
||||
Number of embeddings for AdaLayerNorm, fixed during training and affects the maximum denoising steps during
|
||||
inference.
|
||||
upcast_attention (bool, optional, defaults to False):
|
||||
If true, upcasts the attention mechanism dimensions for potentially improved performance.
|
||||
norm_type (str, optional, defaults to "ada_norm_zero"):
|
||||
Specifies the type of normalization used, can be 'ada_norm_zero'.
|
||||
norm_elementwise_affine (bool, optional, defaults to False):
|
||||
If true, enables element-wise affine parameters in the normalization layers.
|
||||
norm_eps (float, optional, defaults to 1e-5):
|
||||
A small constant added to the denominator in normalization layers to prevent division by zero.
|
||||
"""
|
||||
|
||||
_supports_gradient_checkpointing = True
|
||||
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
num_attention_heads: int = 16,
|
||||
attention_head_dim: int = 72,
|
||||
in_channels: int = 4,
|
||||
out_channels: Optional[int] = None,
|
||||
num_layers: int = 28,
|
||||
dropout: float = 0.0,
|
||||
norm_num_groups: int = 32,
|
||||
attention_bias: bool = True,
|
||||
sample_size: int = 32,
|
||||
patch_size: int = 2,
|
||||
activation_fn: str = "gelu-approximate",
|
||||
num_embeds_ada_norm: Optional[int] = 1000,
|
||||
upcast_attention: bool = False,
|
||||
norm_type: str = "ada_norm_zero",
|
||||
norm_elementwise_affine: bool = False,
|
||||
norm_eps: float = 1e-5,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
# Validate inputs.
|
||||
if norm_type != "ada_norm_zero":
|
||||
raise NotImplementedError(
|
||||
f"Forward pass is not implemented when `patch_size` is not None and `norm_type` is '{norm_type}'."
|
||||
)
|
||||
elif norm_type == "ada_norm_zero" and num_embeds_ada_norm is None:
|
||||
raise ValueError(
|
||||
f"When using a `patch_size` and this `norm_type` ({norm_type}), `num_embeds_ada_norm` cannot be None."
|
||||
)
|
||||
|
||||
# Set some common variables used across the board.
|
||||
self.attention_head_dim = attention_head_dim
|
||||
self.inner_dim = self.config.num_attention_heads * self.config.attention_head_dim
|
||||
self.out_channels = in_channels if out_channels is None else out_channels
|
||||
self.gradient_checkpointing = False
|
||||
|
||||
# 2. Initialize the position embedding and transformer blocks.
|
||||
self.height = self.config.sample_size
|
||||
self.width = self.config.sample_size
|
||||
|
||||
self.patch_size = self.config.patch_size
|
||||
self.pos_embed = PatchEmbed(
|
||||
height=self.config.sample_size,
|
||||
width=self.config.sample_size,
|
||||
patch_size=self.config.patch_size,
|
||||
in_channels=self.config.in_channels,
|
||||
embed_dim=self.inner_dim,
|
||||
)
|
||||
|
||||
self.transformer_blocks = nn.ModuleList(
|
||||
[
|
||||
BasicTransformerBlock(
|
||||
self.inner_dim,
|
||||
self.config.num_attention_heads,
|
||||
self.config.attention_head_dim,
|
||||
dropout=self.config.dropout,
|
||||
activation_fn=self.config.activation_fn,
|
||||
num_embeds_ada_norm=self.config.num_embeds_ada_norm,
|
||||
attention_bias=self.config.attention_bias,
|
||||
upcast_attention=self.config.upcast_attention,
|
||||
norm_type=norm_type,
|
||||
norm_elementwise_affine=self.config.norm_elementwise_affine,
|
||||
norm_eps=self.config.norm_eps,
|
||||
)
|
||||
for _ in range(self.config.num_layers)
|
||||
]
|
||||
)
|
||||
|
||||
# 3. Output blocks.
|
||||
self.norm_out = nn.LayerNorm(self.inner_dim, elementwise_affine=False, eps=1e-6)
|
||||
self.proj_out_1 = nn.Linear(self.inner_dim, 2 * self.inner_dim)
|
||||
self.proj_out_2 = nn.Linear(
|
||||
self.inner_dim, self.config.patch_size * self.config.patch_size * self.out_channels
|
||||
)
|
||||
|
||||
def _set_gradient_checkpointing(self, module, value=False):
|
||||
if hasattr(module, "gradient_checkpointing"):
|
||||
module.gradient_checkpointing = value
|
||||
|
||||
def forward(
|
||||
self,
|
||||
hidden_states: torch.Tensor,
|
||||
timestep: Optional[torch.LongTensor] = None,
|
||||
class_labels: Optional[torch.LongTensor] = None,
|
||||
cross_attention_kwargs: Dict[str, Any] = None,
|
||||
return_dict: bool = True,
|
||||
):
|
||||
"""
|
||||
The [`DiTTransformer2DModel`] forward method.
|
||||
|
||||
Args:
|
||||
hidden_states (`torch.LongTensor` of shape `(batch size, num latent pixels)` if discrete, `torch.FloatTensor` of shape `(batch size, channel, height, width)` if continuous):
|
||||
Input `hidden_states`.
|
||||
timestep ( `torch.LongTensor`, *optional*):
|
||||
Used to indicate denoising step. Optional timestep to be applied as an embedding in `AdaLayerNorm`.
|
||||
class_labels ( `torch.LongTensor` of shape `(batch size, num classes)`, *optional*):
|
||||
Used to indicate class labels conditioning. Optional class labels to be applied as an embedding in
|
||||
`AdaLayerZeroNorm`.
|
||||
cross_attention_kwargs ( `Dict[str, Any]`, *optional*):
|
||||
A kwargs dictionary that if specified is passed along to the `AttentionProcessor` as defined under
|
||||
`self.processor` in
|
||||
[diffusers.models.attention_processor](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
|
||||
return_dict (`bool`, *optional*, defaults to `True`):
|
||||
Whether or not to return a [`~models.unets.unet_2d_condition.UNet2DConditionOutput`] instead of a plain
|
||||
tuple.
|
||||
|
||||
Returns:
|
||||
If `return_dict` is True, an [`~models.transformer_2d.Transformer2DModelOutput`] is returned, otherwise a
|
||||
`tuple` where the first element is the sample tensor.
|
||||
"""
|
||||
# 1. Input
|
||||
height, width = hidden_states.shape[-2] // self.patch_size, hidden_states.shape[-1] // self.patch_size
|
||||
hidden_states = self.pos_embed(hidden_states)
|
||||
|
||||
# 2. Blocks
|
||||
for block in self.transformer_blocks:
|
||||
if self.training and self.gradient_checkpointing:
|
||||
|
||||
def create_custom_forward(module, return_dict=None):
|
||||
def custom_forward(*inputs):
|
||||
if return_dict is not None:
|
||||
return module(*inputs, return_dict=return_dict)
|
||||
else:
|
||||
return module(*inputs)
|
||||
|
||||
return custom_forward
|
||||
|
||||
ckpt_kwargs: Dict[str, Any] = {"use_reentrant": False} if is_torch_version(">=", "1.11.0") else {}
|
||||
hidden_states = torch.utils.checkpoint.checkpoint(
|
||||
create_custom_forward(block),
|
||||
hidden_states,
|
||||
None,
|
||||
None,
|
||||
None,
|
||||
timestep,
|
||||
cross_attention_kwargs,
|
||||
class_labels,
|
||||
**ckpt_kwargs,
|
||||
)
|
||||
else:
|
||||
hidden_states = block(
|
||||
hidden_states,
|
||||
attention_mask=None,
|
||||
encoder_hidden_states=None,
|
||||
encoder_attention_mask=None,
|
||||
timestep=timestep,
|
||||
cross_attention_kwargs=cross_attention_kwargs,
|
||||
class_labels=class_labels,
|
||||
)
|
||||
|
||||
# 3. Output
|
||||
conditioning = self.transformer_blocks[0].norm1.emb(timestep, class_labels, hidden_dtype=hidden_states.dtype)
|
||||
shift, scale = self.proj_out_1(F.silu(conditioning)).chunk(2, dim=1)
|
||||
hidden_states = self.norm_out(hidden_states) * (1 + scale[:, None]) + shift[:, None]
|
||||
hidden_states = self.proj_out_2(hidden_states)
|
||||
|
||||
# unpatchify
|
||||
height = width = int(hidden_states.shape[1] ** 0.5)
|
||||
hidden_states = hidden_states.reshape(
|
||||
shape=(-1, height, width, self.patch_size, self.patch_size, self.out_channels)
|
||||
)
|
||||
hidden_states = torch.einsum("nhwpqc->nchpwq", hidden_states)
|
||||
output = hidden_states.reshape(
|
||||
shape=(-1, self.out_channels, height * self.patch_size, width * self.patch_size)
|
||||
)
|
||||
|
||||
if not return_dict:
|
||||
return (output,)
|
||||
|
||||
return Transformer2DModelOutput(sample=output)
|
||||
@@ -0,0 +1,427 @@
|
||||
# Copyright 2024 HunyuanDiT Authors and The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from typing import Optional
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
from torch import nn
|
||||
|
||||
from ...configuration_utils import ConfigMixin, register_to_config
|
||||
from ...utils import logging
|
||||
from ...utils.torch_utils import maybe_allow_in_graph
|
||||
from ..attention import FeedForward
|
||||
from ..attention_processor import Attention, HunyuanAttnProcessor2_0
|
||||
from ..embeddings import (
|
||||
HunyuanCombinedTimestepTextSizeStyleEmbedding,
|
||||
PatchEmbed,
|
||||
PixArtAlphaTextProjection,
|
||||
)
|
||||
from ..modeling_outputs import Transformer2DModelOutput
|
||||
from ..modeling_utils import ModelMixin
|
||||
from ..normalization import AdaLayerNormContinuous
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
||||
|
||||
class FP32LayerNorm(nn.LayerNorm):
|
||||
def forward(self, inputs: torch.Tensor) -> torch.Tensor:
|
||||
origin_dtype = inputs.dtype
|
||||
return F.layer_norm(
|
||||
inputs.float(), self.normalized_shape, self.weight.float(), self.bias.float(), self.eps
|
||||
).to(origin_dtype)
|
||||
|
||||
|
||||
class AdaLayerNormShift(nn.Module):
|
||||
r"""
|
||||
Norm layer modified to incorporate timestep embeddings.
|
||||
|
||||
Parameters:
|
||||
embedding_dim (`int`): The size of each embedding vector.
|
||||
num_embeddings (`int`): The size of the embeddings dictionary.
|
||||
"""
|
||||
|
||||
def __init__(self, embedding_dim: int, elementwise_affine=True, eps=1e-6):
|
||||
super().__init__()
|
||||
self.silu = nn.SiLU()
|
||||
self.linear = nn.Linear(embedding_dim, embedding_dim)
|
||||
self.norm = FP32LayerNorm(embedding_dim, elementwise_affine=elementwise_affine, eps=eps)
|
||||
|
||||
def forward(self, x: torch.Tensor, emb: torch.Tensor) -> torch.Tensor:
|
||||
shift = self.linear(self.silu(emb.to(torch.float32)).to(emb.dtype))
|
||||
x = self.norm(x) + shift.unsqueeze(dim=1)
|
||||
return x
|
||||
|
||||
|
||||
@maybe_allow_in_graph
|
||||
class HunyuanDiTBlock(nn.Module):
|
||||
r"""
|
||||
Transformer block used in Hunyuan-DiT model (https://github.com/Tencent/HunyuanDiT). Allow skip connection and
|
||||
QKNorm
|
||||
|
||||
Parameters:
|
||||
dim (`int`):
|
||||
The number of channels in the input and output.
|
||||
num_attention_heads (`int`):
|
||||
The number of headsto use for multi-head attention.
|
||||
cross_attention_dim (`int`,*optional*):
|
||||
The size of the encoder_hidden_states vector for cross attention.
|
||||
dropout(`float`, *optional*, defaults to 0.0):
|
||||
The dropout probability to use.
|
||||
activation_fn (`str`,*optional*, defaults to `"geglu"`):
|
||||
Activation function to be used in feed-forward. .
|
||||
norm_elementwise_affine (`bool`, *optional*, defaults to `True`):
|
||||
Whether to use learnable elementwise affine parameters for normalization.
|
||||
norm_eps (`float`, *optional*, defaults to 1e-6):
|
||||
A small constant added to the denominator in normalization layers to prevent division by zero.
|
||||
final_dropout (`bool` *optional*, defaults to False):
|
||||
Whether to apply a final dropout after the last feed-forward layer.
|
||||
ff_inner_dim (`int`, *optional*):
|
||||
The size of the hidden layer in the feed-forward block. Defaults to `None`.
|
||||
ff_bias (`bool`, *optional*, defaults to `True`):
|
||||
Whether to use bias in the feed-forward block.
|
||||
skip (`bool`, *optional*, defaults to `False`):
|
||||
Whether to use skip connection. Defaults to `False` for down-blocks and mid-blocks.
|
||||
qk_norm (`bool`, *optional*, defaults to `True`):
|
||||
Whether to use normalization in QK calculation. Defaults to `True`.
|
||||
"""
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
dim: int,
|
||||
num_attention_heads: int,
|
||||
cross_attention_dim: int = 1024,
|
||||
dropout=0.0,
|
||||
activation_fn: str = "geglu",
|
||||
norm_elementwise_affine: bool = True,
|
||||
norm_eps: float = 1e-6,
|
||||
final_dropout: bool = False,
|
||||
ff_inner_dim: Optional[int] = None,
|
||||
ff_bias: bool = True,
|
||||
skip: bool = False,
|
||||
qk_norm: bool = True,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
# Define 3 blocks. Each block has its own normalization layer.
|
||||
# NOTE: when new version comes, check norm2 and norm 3
|
||||
# 1. Self-Attn
|
||||
self.norm1 = AdaLayerNormShift(dim, elementwise_affine=norm_elementwise_affine, eps=norm_eps)
|
||||
|
||||
self.attn1 = Attention(
|
||||
query_dim=dim,
|
||||
cross_attention_dim=None,
|
||||
dim_head=dim // num_attention_heads,
|
||||
heads=num_attention_heads,
|
||||
qk_norm="layer_norm" if qk_norm else None,
|
||||
eps=1e-6,
|
||||
bias=True,
|
||||
processor=HunyuanAttnProcessor2_0(),
|
||||
)
|
||||
|
||||
# 2. Cross-Attn
|
||||
self.norm2 = FP32LayerNorm(dim, norm_eps, norm_elementwise_affine)
|
||||
|
||||
self.attn2 = Attention(
|
||||
query_dim=dim,
|
||||
cross_attention_dim=cross_attention_dim,
|
||||
dim_head=dim // num_attention_heads,
|
||||
heads=num_attention_heads,
|
||||
qk_norm="layer_norm" if qk_norm else None,
|
||||
eps=1e-6,
|
||||
bias=True,
|
||||
processor=HunyuanAttnProcessor2_0(),
|
||||
)
|
||||
# 3. Feed-forward
|
||||
self.norm3 = FP32LayerNorm(dim, norm_eps, norm_elementwise_affine)
|
||||
|
||||
self.ff = FeedForward(
|
||||
dim,
|
||||
dropout=dropout, ### 0.0
|
||||
activation_fn=activation_fn, ### approx GeLU
|
||||
final_dropout=final_dropout, ### 0.0
|
||||
inner_dim=ff_inner_dim, ### int(dim * mlp_ratio)
|
||||
bias=ff_bias,
|
||||
)
|
||||
|
||||
# 4. Skip Connection
|
||||
if skip:
|
||||
self.skip_norm = FP32LayerNorm(2 * dim, norm_eps, elementwise_affine=True)
|
||||
self.skip_linear = nn.Linear(2 * dim, dim)
|
||||
else:
|
||||
self.skip_linear = None
|
||||
|
||||
# let chunk size default to None
|
||||
self._chunk_size = None
|
||||
self._chunk_dim = 0
|
||||
|
||||
def set_chunk_feed_forward(self, chunk_size: Optional[int], dim: int = 0):
|
||||
# Sets chunk feed-forward
|
||||
self._chunk_size = chunk_size
|
||||
self._chunk_dim = dim
|
||||
|
||||
def forward(
|
||||
self,
|
||||
hidden_states: torch.Tensor,
|
||||
encoder_hidden_states: Optional[torch.Tensor] = None,
|
||||
temb: Optional[torch.Tensor] = None,
|
||||
image_rotary_emb=None,
|
||||
skip=None,
|
||||
) -> torch.Tensor:
|
||||
# Notice that normalization is always applied before the real computation in the following blocks.
|
||||
# 0. Long Skip Connection
|
||||
if self.skip_linear is not None:
|
||||
cat = torch.cat([hidden_states, skip], dim=-1)
|
||||
cat = self.skip_norm(cat)
|
||||
hidden_states = self.skip_linear(cat)
|
||||
|
||||
# 1. Self-Attention
|
||||
norm_hidden_states = self.norm1(hidden_states, temb) ### checked: self.norm1 is correct
|
||||
attn_output = self.attn1(
|
||||
norm_hidden_states,
|
||||
image_rotary_emb=image_rotary_emb,
|
||||
)
|
||||
hidden_states = hidden_states + attn_output
|
||||
|
||||
# 2. Cross-Attention
|
||||
hidden_states = hidden_states + self.attn2(
|
||||
self.norm2(hidden_states),
|
||||
encoder_hidden_states=encoder_hidden_states,
|
||||
image_rotary_emb=image_rotary_emb,
|
||||
)
|
||||
|
||||
# FFN Layer ### TODO: switch norm2 and norm3 in the state dict
|
||||
mlp_inputs = self.norm3(hidden_states)
|
||||
hidden_states = hidden_states + self.ff(mlp_inputs)
|
||||
|
||||
return hidden_states
|
||||
|
||||
|
||||
class HunyuanDiT2DModel(ModelMixin, ConfigMixin):
|
||||
"""
|
||||
HunYuanDiT: Diffusion model with a Transformer backbone.
|
||||
|
||||
Inherit ModelMixin and ConfigMixin to be compatible with the sampler StableDiffusionPipeline of diffusers.
|
||||
|
||||
Parameters:
|
||||
num_attention_heads (`int`, *optional*, defaults to 16):
|
||||
The number of heads to use for multi-head attention.
|
||||
attention_head_dim (`int`, *optional*, defaults to 88):
|
||||
The number of channels in each head.
|
||||
in_channels (`int`, *optional*):
|
||||
The number of channels in the input and output (specify if the input is **continuous**).
|
||||
patch_size (`int`, *optional*):
|
||||
The size of the patch to use for the input.
|
||||
activation_fn (`str`, *optional*, defaults to `"geglu"`):
|
||||
Activation function to use in feed-forward.
|
||||
sample_size (`int`, *optional*):
|
||||
The width of the latent images. This is fixed during training since it is used to learn a number of
|
||||
position embeddings.
|
||||
dropout (`float`, *optional*, defaults to 0.0):
|
||||
The dropout probability to use.
|
||||
cross_attention_dim (`int`, *optional*):
|
||||
The number of dimension in the clip text embedding.
|
||||
hidden_size (`int`, *optional*):
|
||||
The size of hidden layer in the conditioning embedding layers.
|
||||
num_layers (`int`, *optional*, defaults to 1):
|
||||
The number of layers of Transformer blocks to use.
|
||||
mlp_ratio (`float`, *optional*, defaults to 4.0):
|
||||
The ratio of the hidden layer size to the input size.
|
||||
learn_sigma (`bool`, *optional*, defaults to `True`):
|
||||
Whether to predict variance.
|
||||
cross_attention_dim_t5 (`int`, *optional*):
|
||||
The number dimensions in t5 text embedding.
|
||||
pooled_projection_dim (`int`, *optional*):
|
||||
The size of the pooled projection.
|
||||
text_len (`int`, *optional*):
|
||||
The length of the clip text embedding.
|
||||
text_len_t5 (`int`, *optional*):
|
||||
The length of the T5 text embedding.
|
||||
"""
|
||||
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
num_attention_heads: int = 16,
|
||||
attention_head_dim: int = 88,
|
||||
in_channels: Optional[int] = None,
|
||||
patch_size: Optional[int] = None,
|
||||
activation_fn: str = "gelu-approximate",
|
||||
sample_size=32,
|
||||
hidden_size=1152,
|
||||
num_layers: int = 28,
|
||||
mlp_ratio: float = 4.0,
|
||||
learn_sigma: bool = True,
|
||||
cross_attention_dim: int = 1024,
|
||||
norm_type: str = "layer_norm",
|
||||
cross_attention_dim_t5: int = 2048,
|
||||
pooled_projection_dim: int = 1024,
|
||||
text_len: int = 77,
|
||||
text_len_t5: int = 256,
|
||||
):
|
||||
super().__init__()
|
||||
self.out_channels = in_channels * 2 if learn_sigma else in_channels
|
||||
self.num_heads = num_attention_heads
|
||||
self.inner_dim = num_attention_heads * attention_head_dim
|
||||
|
||||
self.text_embedder = PixArtAlphaTextProjection(
|
||||
in_features=cross_attention_dim_t5,
|
||||
hidden_size=cross_attention_dim_t5 * 4,
|
||||
out_features=cross_attention_dim,
|
||||
act_fn="silu_fp32",
|
||||
)
|
||||
|
||||
self.text_embedding_padding = nn.Parameter(
|
||||
torch.randn(text_len + text_len_t5, cross_attention_dim, dtype=torch.float32)
|
||||
)
|
||||
|
||||
self.pos_embed = PatchEmbed(
|
||||
height=sample_size,
|
||||
width=sample_size,
|
||||
in_channels=in_channels,
|
||||
embed_dim=hidden_size,
|
||||
patch_size=patch_size,
|
||||
pos_embed_type=None,
|
||||
)
|
||||
|
||||
self.time_extra_emb = HunyuanCombinedTimestepTextSizeStyleEmbedding(
|
||||
hidden_size,
|
||||
pooled_projection_dim=pooled_projection_dim,
|
||||
seq_len=text_len_t5,
|
||||
cross_attention_dim=cross_attention_dim_t5,
|
||||
)
|
||||
|
||||
# HunyuanDiT Blocks
|
||||
self.blocks = nn.ModuleList(
|
||||
[
|
||||
HunyuanDiTBlock(
|
||||
dim=self.inner_dim,
|
||||
num_attention_heads=self.config.num_attention_heads,
|
||||
activation_fn=activation_fn,
|
||||
ff_inner_dim=int(self.inner_dim * mlp_ratio),
|
||||
cross_attention_dim=cross_attention_dim,
|
||||
qk_norm=True, # See http://arxiv.org/abs/2302.05442 for details.
|
||||
skip=layer > num_layers // 2,
|
||||
)
|
||||
for layer in range(num_layers)
|
||||
]
|
||||
)
|
||||
|
||||
self.norm_out = AdaLayerNormContinuous(self.inner_dim, self.inner_dim, elementwise_affine=False, eps=1e-6)
|
||||
self.proj_out = nn.Linear(self.inner_dim, patch_size * patch_size * self.out_channels, bias=True)
|
||||
|
||||
def forward(
|
||||
self,
|
||||
hidden_states,
|
||||
timestep,
|
||||
encoder_hidden_states=None,
|
||||
text_embedding_mask=None,
|
||||
encoder_hidden_states_t5=None,
|
||||
text_embedding_mask_t5=None,
|
||||
image_meta_size=None,
|
||||
style=None,
|
||||
image_rotary_emb=None,
|
||||
return_dict=True,
|
||||
):
|
||||
"""
|
||||
The [`HunyuanDiT2DModel`] forward method.
|
||||
|
||||
Args:
|
||||
hidden_states (`torch.Tensor` of shape `(batch size, dim, height, width)`):
|
||||
The input tensor.
|
||||
timestep ( `torch.LongTensor`, *optional*):
|
||||
Used to indicate denoising step.
|
||||
encoder_hidden_states ( `torch.Tensor` of shape `(batch size, sequence len, embed dims)`, *optional*):
|
||||
Conditional embeddings for cross attention layer. This is the output of `BertModel`.
|
||||
text_embedding_mask: torch.Tensor
|
||||
An attention mask of shape `(batch, key_tokens)` is applied to `encoder_hidden_states`. This is the output
|
||||
of `BertModel`.
|
||||
encoder_hidden_states_t5 ( `torch.Tensor` of shape `(batch size, sequence len, embed dims)`, *optional*):
|
||||
Conditional embeddings for cross attention layer. This is the output of T5 Text Encoder.
|
||||
text_embedding_mask_t5: torch.Tensor
|
||||
An attention mask of shape `(batch, key_tokens)` is applied to `encoder_hidden_states`. This is the output
|
||||
of T5 Text Encoder.
|
||||
image_meta_size (torch.Tensor):
|
||||
Conditional embedding indicate the image sizes
|
||||
style: torch.Tensor:
|
||||
Conditional embedding indicate the style
|
||||
image_rotary_emb (`torch.Tensor`):
|
||||
The image rotary embeddings to apply on query and key tensors during attention calculation.
|
||||
return_dict: bool
|
||||
Whether to return a dictionary.
|
||||
"""
|
||||
|
||||
height, width = hidden_states.shape[-2:]
|
||||
|
||||
hidden_states = self.pos_embed(hidden_states)
|
||||
|
||||
temb = self.time_extra_emb(
|
||||
timestep, encoder_hidden_states_t5, image_meta_size, style, hidden_dtype=timestep.dtype
|
||||
) # [B, D]
|
||||
|
||||
# text projection
|
||||
batch_size, sequence_length, _ = encoder_hidden_states_t5.shape
|
||||
encoder_hidden_states_t5 = self.text_embedder(
|
||||
encoder_hidden_states_t5.view(-1, encoder_hidden_states_t5.shape[-1])
|
||||
)
|
||||
encoder_hidden_states_t5 = encoder_hidden_states_t5.view(batch_size, sequence_length, -1)
|
||||
|
||||
encoder_hidden_states = torch.cat([encoder_hidden_states, encoder_hidden_states_t5], dim=1)
|
||||
text_embedding_mask = torch.cat([text_embedding_mask, text_embedding_mask_t5], dim=-1)
|
||||
text_embedding_mask = text_embedding_mask.unsqueeze(2).bool()
|
||||
|
||||
encoder_hidden_states = torch.where(text_embedding_mask, encoder_hidden_states, self.text_embedding_padding)
|
||||
|
||||
skips = []
|
||||
for layer, block in enumerate(self.blocks):
|
||||
if layer > self.config.num_layers // 2:
|
||||
skip = skips.pop()
|
||||
hidden_states = block(
|
||||
hidden_states,
|
||||
temb=temb,
|
||||
encoder_hidden_states=encoder_hidden_states,
|
||||
image_rotary_emb=image_rotary_emb,
|
||||
skip=skip,
|
||||
) # (N, L, D)
|
||||
else:
|
||||
hidden_states = block(
|
||||
hidden_states,
|
||||
temb=temb,
|
||||
encoder_hidden_states=encoder_hidden_states,
|
||||
image_rotary_emb=image_rotary_emb,
|
||||
) # (N, L, D)
|
||||
|
||||
if layer < (self.config.num_layers // 2 - 1):
|
||||
skips.append(hidden_states)
|
||||
|
||||
# final layer
|
||||
hidden_states = self.norm_out(hidden_states, temb.to(torch.float32))
|
||||
hidden_states = self.proj_out(hidden_states)
|
||||
# (N, L, patch_size ** 2 * out_channels)
|
||||
|
||||
# unpatchify: (N, out_channels, H, W)
|
||||
patch_size = self.pos_embed.patch_size
|
||||
height = height // patch_size
|
||||
width = width // patch_size
|
||||
|
||||
hidden_states = hidden_states.reshape(
|
||||
shape=(hidden_states.shape[0], height, width, patch_size, patch_size, self.out_channels)
|
||||
)
|
||||
hidden_states = torch.einsum("nhwpqc->nchpwq", hidden_states)
|
||||
output = hidden_states.reshape(
|
||||
shape=(hidden_states.shape[0], self.out_channels, height * patch_size, width * patch_size)
|
||||
)
|
||||
if not return_dict:
|
||||
return (output,)
|
||||
return Transformer2DModelOutput(sample=output)
|
||||
@@ -0,0 +1,336 @@
|
||||
# Copyright 2024 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from typing import Any, Dict, Optional
|
||||
|
||||
import torch
|
||||
from torch import nn
|
||||
|
||||
from ...configuration_utils import ConfigMixin, register_to_config
|
||||
from ...utils import is_torch_version, logging
|
||||
from ..attention import BasicTransformerBlock
|
||||
from ..embeddings import PatchEmbed, PixArtAlphaTextProjection
|
||||
from ..modeling_outputs import Transformer2DModelOutput
|
||||
from ..modeling_utils import ModelMixin
|
||||
from ..normalization import AdaLayerNormSingle
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
||||
|
||||
class PixArtTransformer2DModel(ModelMixin, ConfigMixin):
|
||||
r"""
|
||||
A 2D Transformer model as introduced in PixArt family of models (https://arxiv.org/abs/2310.00426,
|
||||
https://arxiv.org/abs/2403.04692).
|
||||
|
||||
Parameters:
|
||||
num_attention_heads (int, optional, defaults to 16): The number of heads to use for multi-head attention.
|
||||
attention_head_dim (int, optional, defaults to 72): The number of channels in each head.
|
||||
in_channels (int, defaults to 4): The number of channels in the input.
|
||||
out_channels (int, optional):
|
||||
The number of channels in the output. Specify this parameter if the output channel number differs from the
|
||||
input.
|
||||
num_layers (int, optional, defaults to 28): The number of layers of Transformer blocks to use.
|
||||
dropout (float, optional, defaults to 0.0): The dropout probability to use within the Transformer blocks.
|
||||
norm_num_groups (int, optional, defaults to 32):
|
||||
Number of groups for group normalization within Transformer blocks.
|
||||
cross_attention_dim (int, optional):
|
||||
The dimensionality for cross-attention layers, typically matching the encoder's hidden dimension.
|
||||
attention_bias (bool, optional, defaults to True):
|
||||
Configure if the Transformer blocks' attention should contain a bias parameter.
|
||||
sample_size (int, defaults to 128):
|
||||
The width of the latent images. This parameter is fixed during training.
|
||||
patch_size (int, defaults to 2):
|
||||
Size of the patches the model processes, relevant for architectures working on non-sequential data.
|
||||
activation_fn (str, optional, defaults to "gelu-approximate"):
|
||||
Activation function to use in feed-forward networks within Transformer blocks.
|
||||
num_embeds_ada_norm (int, optional, defaults to 1000):
|
||||
Number of embeddings for AdaLayerNorm, fixed during training and affects the maximum denoising steps during
|
||||
inference.
|
||||
upcast_attention (bool, optional, defaults to False):
|
||||
If true, upcasts the attention mechanism dimensions for potentially improved performance.
|
||||
norm_type (str, optional, defaults to "ada_norm_zero"):
|
||||
Specifies the type of normalization used, can be 'ada_norm_zero'.
|
||||
norm_elementwise_affine (bool, optional, defaults to False):
|
||||
If true, enables element-wise affine parameters in the normalization layers.
|
||||
norm_eps (float, optional, defaults to 1e-6):
|
||||
A small constant added to the denominator in normalization layers to prevent division by zero.
|
||||
interpolation_scale (int, optional): Scale factor to use during interpolating the position embeddings.
|
||||
use_additional_conditions (bool, optional): If we're using additional conditions as inputs.
|
||||
attention_type (str, optional, defaults to "default"): Kind of attention mechanism to be used.
|
||||
caption_channels (int, optional, defaults to None):
|
||||
Number of channels to use for projecting the caption embeddings.
|
||||
use_linear_projection (bool, optional, defaults to False):
|
||||
Deprecated argument. Will be removed in a future version.
|
||||
num_vector_embeds (bool, optional, defaults to False):
|
||||
Deprecated argument. Will be removed in a future version.
|
||||
"""
|
||||
|
||||
_supports_gradient_checkpointing = True
|
||||
_no_split_modules = ["BasicTransformerBlock", "PatchEmbed"]
|
||||
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
num_attention_heads: int = 16,
|
||||
attention_head_dim: int = 72,
|
||||
in_channels: int = 4,
|
||||
out_channels: Optional[int] = 8,
|
||||
num_layers: int = 28,
|
||||
dropout: float = 0.0,
|
||||
norm_num_groups: int = 32,
|
||||
cross_attention_dim: Optional[int] = 1152,
|
||||
attention_bias: bool = True,
|
||||
sample_size: int = 128,
|
||||
patch_size: int = 2,
|
||||
activation_fn: str = "gelu-approximate",
|
||||
num_embeds_ada_norm: Optional[int] = 1000,
|
||||
upcast_attention: bool = False,
|
||||
norm_type: str = "ada_norm_single",
|
||||
norm_elementwise_affine: bool = False,
|
||||
norm_eps: float = 1e-6,
|
||||
interpolation_scale: Optional[int] = None,
|
||||
use_additional_conditions: Optional[bool] = None,
|
||||
caption_channels: Optional[int] = None,
|
||||
attention_type: Optional[str] = "default",
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
# Validate inputs.
|
||||
if norm_type != "ada_norm_single":
|
||||
raise NotImplementedError(
|
||||
f"Forward pass is not implemented when `patch_size` is not None and `norm_type` is '{norm_type}'."
|
||||
)
|
||||
elif norm_type == "ada_norm_single" and num_embeds_ada_norm is None:
|
||||
raise ValueError(
|
||||
f"When using a `patch_size` and this `norm_type` ({norm_type}), `num_embeds_ada_norm` cannot be None."
|
||||
)
|
||||
|
||||
# Set some common variables used across the board.
|
||||
self.attention_head_dim = attention_head_dim
|
||||
self.inner_dim = self.config.num_attention_heads * self.config.attention_head_dim
|
||||
self.out_channels = in_channels if out_channels is None else out_channels
|
||||
if use_additional_conditions is None:
|
||||
if sample_size == 128:
|
||||
use_additional_conditions = True
|
||||
else:
|
||||
use_additional_conditions = False
|
||||
self.use_additional_conditions = use_additional_conditions
|
||||
|
||||
self.gradient_checkpointing = False
|
||||
|
||||
# 2. Initialize the position embedding and transformer blocks.
|
||||
self.height = self.config.sample_size
|
||||
self.width = self.config.sample_size
|
||||
|
||||
interpolation_scale = (
|
||||
self.config.interpolation_scale
|
||||
if self.config.interpolation_scale is not None
|
||||
else max(self.config.sample_size // 64, 1)
|
||||
)
|
||||
self.pos_embed = PatchEmbed(
|
||||
height=self.config.sample_size,
|
||||
width=self.config.sample_size,
|
||||
patch_size=self.config.patch_size,
|
||||
in_channels=self.config.in_channels,
|
||||
embed_dim=self.inner_dim,
|
||||
interpolation_scale=interpolation_scale,
|
||||
)
|
||||
|
||||
self.transformer_blocks = nn.ModuleList(
|
||||
[
|
||||
BasicTransformerBlock(
|
||||
self.inner_dim,
|
||||
self.config.num_attention_heads,
|
||||
self.config.attention_head_dim,
|
||||
dropout=self.config.dropout,
|
||||
cross_attention_dim=self.config.cross_attention_dim,
|
||||
activation_fn=self.config.activation_fn,
|
||||
num_embeds_ada_norm=self.config.num_embeds_ada_norm,
|
||||
attention_bias=self.config.attention_bias,
|
||||
upcast_attention=self.config.upcast_attention,
|
||||
norm_type=norm_type,
|
||||
norm_elementwise_affine=self.config.norm_elementwise_affine,
|
||||
norm_eps=self.config.norm_eps,
|
||||
attention_type=self.config.attention_type,
|
||||
)
|
||||
for _ in range(self.config.num_layers)
|
||||
]
|
||||
)
|
||||
|
||||
# 3. Output blocks.
|
||||
self.norm_out = nn.LayerNorm(self.inner_dim, elementwise_affine=False, eps=1e-6)
|
||||
self.scale_shift_table = nn.Parameter(torch.randn(2, self.inner_dim) / self.inner_dim**0.5)
|
||||
self.proj_out = nn.Linear(self.inner_dim, self.config.patch_size * self.config.patch_size * self.out_channels)
|
||||
|
||||
self.adaln_single = AdaLayerNormSingle(
|
||||
self.inner_dim, use_additional_conditions=self.use_additional_conditions
|
||||
)
|
||||
self.caption_projection = None
|
||||
if self.config.caption_channels is not None:
|
||||
self.caption_projection = PixArtAlphaTextProjection(
|
||||
in_features=self.config.caption_channels, hidden_size=self.inner_dim
|
||||
)
|
||||
|
||||
def _set_gradient_checkpointing(self, module, value=False):
|
||||
if hasattr(module, "gradient_checkpointing"):
|
||||
module.gradient_checkpointing = value
|
||||
|
||||
def forward(
|
||||
self,
|
||||
hidden_states: torch.Tensor,
|
||||
encoder_hidden_states: Optional[torch.Tensor] = None,
|
||||
timestep: Optional[torch.LongTensor] = None,
|
||||
added_cond_kwargs: Dict[str, torch.Tensor] = None,
|
||||
cross_attention_kwargs: Dict[str, Any] = None,
|
||||
attention_mask: Optional[torch.Tensor] = None,
|
||||
encoder_attention_mask: Optional[torch.Tensor] = None,
|
||||
return_dict: bool = True,
|
||||
):
|
||||
"""
|
||||
The [`PixArtTransformer2DModel`] forward method.
|
||||
|
||||
Args:
|
||||
hidden_states (`torch.FloatTensor` of shape `(batch size, channel, height, width)`):
|
||||
Input `hidden_states`.
|
||||
encoder_hidden_states (`torch.FloatTensor` of shape `(batch size, sequence len, embed dims)`, *optional*):
|
||||
Conditional embeddings for cross attention layer. If not given, cross-attention defaults to
|
||||
self-attention.
|
||||
timestep (`torch.LongTensor`, *optional*):
|
||||
Used to indicate denoising step. Optional timestep to be applied as an embedding in `AdaLayerNorm`.
|
||||
added_cond_kwargs: (`Dict[str, Any]`, *optional*): Additional conditions to be used as inputs.
|
||||
cross_attention_kwargs ( `Dict[str, Any]`, *optional*):
|
||||
A kwargs dictionary that if specified is passed along to the `AttentionProcessor` as defined under
|
||||
`self.processor` in
|
||||
[diffusers.models.attention_processor](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
|
||||
attention_mask ( `torch.Tensor`, *optional*):
|
||||
An attention mask of shape `(batch, key_tokens)` is applied to `encoder_hidden_states`. If `1` the mask
|
||||
is kept, otherwise if `0` it is discarded. Mask will be converted into a bias, which adds large
|
||||
negative values to the attention scores corresponding to "discard" tokens.
|
||||
encoder_attention_mask ( `torch.Tensor`, *optional*):
|
||||
Cross-attention mask applied to `encoder_hidden_states`. Two formats supported:
|
||||
|
||||
* Mask `(batch, sequence_length)` True = keep, False = discard.
|
||||
* Bias `(batch, 1, sequence_length)` 0 = keep, -10000 = discard.
|
||||
|
||||
If `ndim == 2`: will be interpreted as a mask, then converted into a bias consistent with the format
|
||||
above. This bias will be added to the cross-attention scores.
|
||||
return_dict (`bool`, *optional*, defaults to `True`):
|
||||
Whether or not to return a [`~models.unets.unet_2d_condition.UNet2DConditionOutput`] instead of a plain
|
||||
tuple.
|
||||
|
||||
Returns:
|
||||
If `return_dict` is True, an [`~models.transformer_2d.Transformer2DModelOutput`] is returned, otherwise a
|
||||
`tuple` where the first element is the sample tensor.
|
||||
"""
|
||||
if self.use_additional_conditions and added_cond_kwargs is None:
|
||||
raise ValueError("`added_cond_kwargs` cannot be None when using additional conditions for `adaln_single`.")
|
||||
|
||||
# ensure attention_mask is a bias, and give it a singleton query_tokens dimension.
|
||||
# we may have done this conversion already, e.g. if we came here via UNet2DConditionModel#forward.
|
||||
# we can tell by counting dims; if ndim == 2: it's a mask rather than a bias.
|
||||
# expects mask of shape:
|
||||
# [batch, key_tokens]
|
||||
# adds singleton query_tokens dimension:
|
||||
# [batch, 1, key_tokens]
|
||||
# this helps to broadcast it as a bias over attention scores, which will be in one of the following shapes:
|
||||
# [batch, heads, query_tokens, key_tokens] (e.g. torch sdp attn)
|
||||
# [batch * heads, query_tokens, key_tokens] (e.g. xformers or classic attn)
|
||||
if attention_mask is not None and attention_mask.ndim == 2:
|
||||
# assume that mask is expressed as:
|
||||
# (1 = keep, 0 = discard)
|
||||
# convert mask into a bias that can be added to attention scores:
|
||||
# (keep = +0, discard = -10000.0)
|
||||
attention_mask = (1 - attention_mask.to(hidden_states.dtype)) * -10000.0
|
||||
attention_mask = attention_mask.unsqueeze(1)
|
||||
|
||||
# convert encoder_attention_mask to a bias the same way we do for attention_mask
|
||||
if encoder_attention_mask is not None and encoder_attention_mask.ndim == 2:
|
||||
encoder_attention_mask = (1 - encoder_attention_mask.to(hidden_states.dtype)) * -10000.0
|
||||
encoder_attention_mask = encoder_attention_mask.unsqueeze(1)
|
||||
|
||||
# 1. Input
|
||||
batch_size = hidden_states.shape[0]
|
||||
height, width = (
|
||||
hidden_states.shape[-2] // self.config.patch_size,
|
||||
hidden_states.shape[-1] // self.config.patch_size,
|
||||
)
|
||||
hidden_states = self.pos_embed(hidden_states)
|
||||
|
||||
timestep, embedded_timestep = self.adaln_single(
|
||||
timestep, added_cond_kwargs, batch_size=batch_size, hidden_dtype=hidden_states.dtype
|
||||
)
|
||||
|
||||
if self.caption_projection is not None:
|
||||
encoder_hidden_states = self.caption_projection(encoder_hidden_states)
|
||||
encoder_hidden_states = encoder_hidden_states.view(batch_size, -1, hidden_states.shape[-1])
|
||||
|
||||
# 2. Blocks
|
||||
for block in self.transformer_blocks:
|
||||
if self.training and self.gradient_checkpointing:
|
||||
|
||||
def create_custom_forward(module, return_dict=None):
|
||||
def custom_forward(*inputs):
|
||||
if return_dict is not None:
|
||||
return module(*inputs, return_dict=return_dict)
|
||||
else:
|
||||
return module(*inputs)
|
||||
|
||||
return custom_forward
|
||||
|
||||
ckpt_kwargs: Dict[str, Any] = {"use_reentrant": False} if is_torch_version(">=", "1.11.0") else {}
|
||||
hidden_states = torch.utils.checkpoint.checkpoint(
|
||||
create_custom_forward(block),
|
||||
hidden_states,
|
||||
attention_mask,
|
||||
encoder_hidden_states,
|
||||
encoder_attention_mask,
|
||||
timestep,
|
||||
cross_attention_kwargs,
|
||||
None,
|
||||
**ckpt_kwargs,
|
||||
)
|
||||
else:
|
||||
hidden_states = block(
|
||||
hidden_states,
|
||||
attention_mask=attention_mask,
|
||||
encoder_hidden_states=encoder_hidden_states,
|
||||
encoder_attention_mask=encoder_attention_mask,
|
||||
timestep=timestep,
|
||||
cross_attention_kwargs=cross_attention_kwargs,
|
||||
class_labels=None,
|
||||
)
|
||||
|
||||
# 3. Output
|
||||
shift, scale = (
|
||||
self.scale_shift_table[None] + embedded_timestep[:, None].to(self.scale_shift_table.device)
|
||||
).chunk(2, dim=1)
|
||||
hidden_states = self.norm_out(hidden_states)
|
||||
# Modulation
|
||||
hidden_states = hidden_states * (1 + scale.to(hidden_states.device)) + shift.to(hidden_states.device)
|
||||
hidden_states = self.proj_out(hidden_states)
|
||||
hidden_states = hidden_states.squeeze(1)
|
||||
|
||||
# unpatchify
|
||||
hidden_states = hidden_states.reshape(
|
||||
shape=(-1, height, width, self.config.patch_size, self.config.patch_size, self.out_channels)
|
||||
)
|
||||
hidden_states = torch.einsum("nhwpqc->nchpwq", hidden_states)
|
||||
output = hidden_states.reshape(
|
||||
shape=(-1, self.out_channels, height * self.config.patch_size, width * self.config.patch_size)
|
||||
)
|
||||
|
||||
if not return_dict:
|
||||
return (output,)
|
||||
|
||||
return Transformer2DModelOutput(sample=output)
|
||||
@@ -11,39 +11,30 @@
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
from dataclasses import dataclass
|
||||
from typing import Any, Dict, Optional
|
||||
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
from torch import nn
|
||||
|
||||
from ...configuration_utils import ConfigMixin, register_to_config
|
||||
from ...utils import BaseOutput, deprecate, is_torch_version, logging
|
||||
from ...configuration_utils import LegacyConfigMixin, register_to_config
|
||||
from ...utils import deprecate, is_torch_version, logging
|
||||
from ..attention import BasicTransformerBlock
|
||||
from ..embeddings import ImagePositionalEmbeddings, PatchEmbed, PixArtAlphaTextProjection
|
||||
from ..modeling_utils import ModelMixin
|
||||
from ..modeling_outputs import Transformer2DModelOutput
|
||||
from ..modeling_utils import LegacyModelMixin
|
||||
from ..normalization import AdaLayerNormSingle
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
||||
|
||||
@dataclass
|
||||
class Transformer2DModelOutput(BaseOutput):
|
||||
"""
|
||||
The output of [`Transformer2DModel`].
|
||||
|
||||
Args:
|
||||
sample (`torch.Tensor` of shape `(batch_size, num_channels, height, width)` or `(batch size, num_vector_embeds - 1, num_latent_pixels)` if [`Transformer2DModel`] is discrete):
|
||||
The hidden states output conditioned on the `encoder_hidden_states` input. If discrete, returns probability
|
||||
distributions for the unnoised latent pixels.
|
||||
"""
|
||||
|
||||
sample: torch.Tensor
|
||||
class Transformer2DModelOutput(Transformer2DModelOutput):
|
||||
deprecation_message = "Importing `Transformer2DModelOutput` from `diffusers.models.transformer_2d` is deprecated and this will be removed in a future version. Please use `from diffusers.models.modeling_outputs import Transformer2DModelOutput`, instead."
|
||||
deprecate("Transformer2DModelOutput", "1.0.0", deprecation_message)
|
||||
|
||||
|
||||
class Transformer2DModel(ModelMixin, ConfigMixin):
|
||||
class Transformer2DModel(LegacyModelMixin, LegacyConfigMixin):
|
||||
"""
|
||||
A 2D Transformer model for image-like data.
|
||||
|
||||
@@ -116,40 +107,12 @@ class Transformer2DModel(ModelMixin, ConfigMixin):
|
||||
f"When using a `patch_size` and this `norm_type` ({norm_type}), `num_embeds_ada_norm` cannot be None."
|
||||
)
|
||||
|
||||
# Set some common variables used across the board.
|
||||
self.use_linear_projection = use_linear_projection
|
||||
self.interpolation_scale = interpolation_scale
|
||||
self.caption_channels = caption_channels
|
||||
self.num_attention_heads = num_attention_heads
|
||||
self.attention_head_dim = attention_head_dim
|
||||
self.inner_dim = self.config.num_attention_heads * self.config.attention_head_dim
|
||||
self.in_channels = in_channels
|
||||
self.out_channels = in_channels if out_channels is None else out_channels
|
||||
self.gradient_checkpointing = False
|
||||
if use_additional_conditions is None:
|
||||
if norm_type == "ada_norm_single" and sample_size == 128:
|
||||
use_additional_conditions = True
|
||||
else:
|
||||
use_additional_conditions = False
|
||||
self.use_additional_conditions = use_additional_conditions
|
||||
|
||||
# 1. Transformer2DModel can process both standard continuous images of shape `(batch_size, num_channels, width, height)` as well as quantized image embeddings of shape `(batch_size, num_image_vectors)`
|
||||
# Define whether input is continuous or discrete depending on configuration
|
||||
self.is_input_continuous = (in_channels is not None) and (patch_size is None)
|
||||
self.is_input_vectorized = num_vector_embeds is not None
|
||||
self.is_input_patches = in_channels is not None and patch_size is not None
|
||||
|
||||
if norm_type == "layer_norm" and num_embeds_ada_norm is not None:
|
||||
deprecation_message = (
|
||||
f"The configuration file of this model: {self.__class__} is outdated. `norm_type` is either not set or"
|
||||
" incorrectly set to `'layer_norm'`. Make sure to set `norm_type` to `'ada_norm'` in the config."
|
||||
" Please make sure to update the config accordingly as leaving `norm_type` might led to incorrect"
|
||||
" results in future versions. If you have downloaded this checkpoint from the Hugging Face Hub, it"
|
||||
" would be very nice if you could open a Pull request for the `transformer/config.json` file"
|
||||
)
|
||||
deprecate("norm_type!=num_embeds_ada_norm", "1.0.0", deprecation_message, standard_warn=False)
|
||||
norm_type = "ada_norm"
|
||||
|
||||
if self.is_input_continuous and self.is_input_vectorized:
|
||||
raise ValueError(
|
||||
f"Cannot define both `in_channels`: {in_channels} and `num_vector_embeds`: {num_vector_embeds}. Make"
|
||||
@@ -166,6 +129,35 @@ class Transformer2DModel(ModelMixin, ConfigMixin):
|
||||
f" {patch_size}. Make sure that `in_channels`, `num_vector_embeds` or `num_patches` is not None."
|
||||
)
|
||||
|
||||
if norm_type == "layer_norm" and num_embeds_ada_norm is not None:
|
||||
deprecation_message = (
|
||||
f"The configuration file of this model: {self.__class__} is outdated. `norm_type` is either not set or"
|
||||
" incorrectly set to `'layer_norm'`. Make sure to set `norm_type` to `'ada_norm'` in the config."
|
||||
" Please make sure to update the config accordingly as leaving `norm_type` might led to incorrect"
|
||||
" results in future versions. If you have downloaded this checkpoint from the Hugging Face Hub, it"
|
||||
" would be very nice if you could open a Pull request for the `transformer/config.json` file"
|
||||
)
|
||||
deprecate("norm_type!=num_embeds_ada_norm", "1.0.0", deprecation_message, standard_warn=False)
|
||||
norm_type = "ada_norm"
|
||||
|
||||
# Set some common variables used across the board.
|
||||
self.use_linear_projection = use_linear_projection
|
||||
self.interpolation_scale = interpolation_scale
|
||||
self.caption_channels = caption_channels
|
||||
self.num_attention_heads = num_attention_heads
|
||||
self.attention_head_dim = attention_head_dim
|
||||
self.inner_dim = self.config.num_attention_heads * self.config.attention_head_dim
|
||||
self.in_channels = in_channels
|
||||
self.out_channels = in_channels if out_channels is None else out_channels
|
||||
self.gradient_checkpointing = False
|
||||
|
||||
if use_additional_conditions is None:
|
||||
if norm_type == "ada_norm_single" and sample_size == 128:
|
||||
use_additional_conditions = True
|
||||
else:
|
||||
use_additional_conditions = False
|
||||
self.use_additional_conditions = use_additional_conditions
|
||||
|
||||
# 2. Initialize the right blocks.
|
||||
# These functions follow a common structure:
|
||||
# a. Initialize the input blocks. b. Initialize the transformer blocks.
|
||||
|
||||
@@ -24,6 +24,7 @@ _import_structure = {
|
||||
"deprecated": [],
|
||||
"latent_diffusion": [],
|
||||
"ledits_pp": [],
|
||||
"marigold": [],
|
||||
"stable_diffusion": [],
|
||||
"stable_diffusion_xl": [],
|
||||
}
|
||||
@@ -149,6 +150,7 @@ else:
|
||||
"IFPipeline",
|
||||
"IFSuperResolutionPipeline",
|
||||
]
|
||||
_import_structure["hunyuandit"] = ["HunyuanDiTPipeline"]
|
||||
_import_structure["kandinsky"] = [
|
||||
"KandinskyCombinedPipeline",
|
||||
"KandinskyImg2ImgCombinedPipeline",
|
||||
@@ -185,6 +187,12 @@ else:
|
||||
"LEditsPPPipelineStableDiffusionXL",
|
||||
]
|
||||
)
|
||||
_import_structure["marigold"].extend(
|
||||
[
|
||||
"MarigoldDepthPipeline",
|
||||
"MarigoldNormalsPipeline",
|
||||
]
|
||||
)
|
||||
_import_structure["musicldm"] = ["MusicLDMPipeline"]
|
||||
_import_structure["paint_by_example"] = ["PaintByExamplePipeline"]
|
||||
_import_structure["pia"] = ["PIAPipeline"]
|
||||
@@ -411,6 +419,7 @@ if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
|
||||
VersatileDiffusionTextToImagePipeline,
|
||||
VQDiffusionPipeline,
|
||||
)
|
||||
from .hunyuandit import HunyuanDiTPipeline
|
||||
from .i2vgen_xl import I2VGenXLPipeline
|
||||
from .kandinsky import (
|
||||
KandinskyCombinedPipeline,
|
||||
@@ -448,6 +457,10 @@ if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
|
||||
LEditsPPPipelineStableDiffusion,
|
||||
LEditsPPPipelineStableDiffusionXL,
|
||||
)
|
||||
from .marigold import (
|
||||
MarigoldDepthPipeline,
|
||||
MarigoldNormalsPipeline,
|
||||
)
|
||||
from .musicldm import MusicLDMPipeline
|
||||
from .paint_by_example import PaintByExamplePipeline
|
||||
from .pia import PIAPipeline
|
||||
|
||||
@@ -22,7 +22,7 @@ from typing import Dict, List, Optional, Tuple, Union
|
||||
|
||||
import torch
|
||||
|
||||
from ...models import AutoencoderKL, Transformer2DModel
|
||||
from ...models import AutoencoderKL, DiTTransformer2DModel
|
||||
from ...schedulers import KarrasDiffusionSchedulers
|
||||
from ...utils.torch_utils import randn_tensor
|
||||
from ..pipeline_utils import DiffusionPipeline, ImagePipelineOutput
|
||||
@@ -36,8 +36,8 @@ class DiTPipeline(DiffusionPipeline):
|
||||
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
|
||||
|
||||
Parameters:
|
||||
transformer ([`Transformer2DModel`]):
|
||||
A class conditioned `Transformer2DModel` to denoise the encoded image latents.
|
||||
transformer ([`DiTTransformer2DModel`]):
|
||||
A class conditioned `DiTTransformer2DModel` to denoise the encoded image latents.
|
||||
vae ([`AutoencoderKL`]):
|
||||
Variational Auto-Encoder (VAE) model to encode and decode images to and from latent representations.
|
||||
scheduler ([`DDIMScheduler`]):
|
||||
@@ -48,7 +48,7 @@ class DiTPipeline(DiffusionPipeline):
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
transformer: Transformer2DModel,
|
||||
transformer: DiTTransformer2DModel,
|
||||
vae: AutoencoderKL,
|
||||
scheduler: KarrasDiffusionSchedulers,
|
||||
id2label: Optional[Dict[int, str]] = None,
|
||||
|
||||
@@ -0,0 +1,48 @@
|
||||
from typing import TYPE_CHECKING
|
||||
|
||||
from ...utils import (
|
||||
DIFFUSERS_SLOW_IMPORT,
|
||||
OptionalDependencyNotAvailable,
|
||||
_LazyModule,
|
||||
get_objects_from_module,
|
||||
is_torch_available,
|
||||
is_transformers_available,
|
||||
)
|
||||
|
||||
|
||||
_dummy_objects = {}
|
||||
_import_structure = {}
|
||||
|
||||
|
||||
try:
|
||||
if not (is_transformers_available() and is_torch_available()):
|
||||
raise OptionalDependencyNotAvailable()
|
||||
except OptionalDependencyNotAvailable:
|
||||
from ...utils import dummy_torch_and_transformers_objects # noqa F403
|
||||
|
||||
_dummy_objects.update(get_objects_from_module(dummy_torch_and_transformers_objects))
|
||||
else:
|
||||
_import_structure["pipeline_hunyuandit"] = ["HunyuanDiTPipeline"]
|
||||
|
||||
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
|
||||
try:
|
||||
if not (is_transformers_available() and is_torch_available()):
|
||||
raise OptionalDependencyNotAvailable()
|
||||
|
||||
except OptionalDependencyNotAvailable:
|
||||
from ...utils.dummy_torch_and_transformers_objects import *
|
||||
else:
|
||||
from .pipeline_hunyuandit import HunyuanDiTPipeline
|
||||
|
||||
else:
|
||||
import sys
|
||||
|
||||
sys.modules[__name__] = _LazyModule(
|
||||
__name__,
|
||||
globals()["__file__"],
|
||||
_import_structure,
|
||||
module_spec=__spec__,
|
||||
)
|
||||
|
||||
for name, value in _dummy_objects.items():
|
||||
setattr(sys.modules[__name__], name, value)
|
||||
@@ -0,0 +1,881 @@
|
||||
# Copyright 2024 HunyuanDiT Authors and The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
|
||||
import inspect
|
||||
from typing import Callable, Dict, List, Optional, Tuple, Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
from transformers import BertModel, BertTokenizer, CLIPImageProcessor, MT5Tokenizer, T5EncoderModel
|
||||
|
||||
from diffusers.pipelines.stable_diffusion import StableDiffusionPipelineOutput
|
||||
|
||||
from ...callbacks import MultiPipelineCallbacks, PipelineCallback
|
||||
from ...image_processor import VaeImageProcessor
|
||||
from ...models import AutoencoderKL, HunyuanDiT2DModel
|
||||
from ...models.embeddings import get_2d_rotary_pos_embed
|
||||
from ...pipelines.stable_diffusion.safety_checker import StableDiffusionSafetyChecker
|
||||
from ...schedulers import DDPMScheduler
|
||||
from ...utils import (
|
||||
is_torch_xla_available,
|
||||
logging,
|
||||
replace_example_docstring,
|
||||
)
|
||||
from ...utils.torch_utils import randn_tensor
|
||||
from ..pipeline_utils import DiffusionPipeline
|
||||
|
||||
|
||||
if is_torch_xla_available():
|
||||
import torch_xla.core.xla_model as xm
|
||||
|
||||
XLA_AVAILABLE = True
|
||||
else:
|
||||
XLA_AVAILABLE = False
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
||||
EXAMPLE_DOC_STRING = """
|
||||
Examples:
|
||||
```py
|
||||
>>> import torch
|
||||
>>> from diffusers import HunyuanDiTPipeline
|
||||
|
||||
>>> pipe = HunyuanDiTPipeline.from_pretrained("Tencent-Hunyuan/HunyuanDiT", torch_dtype=torch.float16)
|
||||
>>> pipe.to("cuda")
|
||||
|
||||
>>> # You may also use English prompt as HunyuanDiT supports both English and Chinese
|
||||
>>> # prompt = "An astronaut riding a horse"
|
||||
>>> prompt = "一个宇航员在骑马"
|
||||
>>> image = pipe(prompt).images[0]
|
||||
```
|
||||
"""
|
||||
|
||||
STANDARD_RATIO = np.array(
|
||||
[
|
||||
1.0, # 1:1
|
||||
4.0 / 3.0, # 4:3
|
||||
3.0 / 4.0, # 3:4
|
||||
16.0 / 9.0, # 16:9
|
||||
9.0 / 16.0, # 9:16
|
||||
]
|
||||
)
|
||||
STANDARD_SHAPE = [
|
||||
[(1024, 1024), (1280, 1280)], # 1:1
|
||||
[(1024, 768), (1152, 864), (1280, 960)], # 4:3
|
||||
[(768, 1024), (864, 1152), (960, 1280)], # 3:4
|
||||
[(1280, 768)], # 16:9
|
||||
[(768, 1280)], # 9:16
|
||||
]
|
||||
STANDARD_AREA = [np.array([w * h for w, h in shapes]) for shapes in STANDARD_SHAPE]
|
||||
SUPPORTED_SHAPE = [
|
||||
(1024, 1024),
|
||||
(1280, 1280), # 1:1
|
||||
(1024, 768),
|
||||
(1152, 864),
|
||||
(1280, 960), # 4:3
|
||||
(768, 1024),
|
||||
(864, 1152),
|
||||
(960, 1280), # 3:4
|
||||
(1280, 768), # 16:9
|
||||
(768, 1280), # 9:16
|
||||
]
|
||||
|
||||
|
||||
def map_to_standard_shapes(target_width, target_height):
|
||||
target_ratio = target_width / target_height
|
||||
closest_ratio_idx = np.argmin(np.abs(STANDARD_RATIO - target_ratio))
|
||||
closest_area_idx = np.argmin(np.abs(STANDARD_AREA[closest_ratio_idx] - target_width * target_height))
|
||||
width, height = STANDARD_SHAPE[closest_ratio_idx][closest_area_idx]
|
||||
return width, height
|
||||
|
||||
|
||||
def get_resize_crop_region_for_grid(src, tgt_size):
|
||||
th = tw = tgt_size
|
||||
h, w = src
|
||||
|
||||
r = h / w
|
||||
|
||||
# resize
|
||||
if r > 1:
|
||||
resize_height = th
|
||||
resize_width = int(round(th / h * w))
|
||||
else:
|
||||
resize_width = tw
|
||||
resize_height = int(round(tw / w * h))
|
||||
|
||||
crop_top = int(round((th - resize_height) / 2.0))
|
||||
crop_left = int(round((tw - resize_width) / 2.0))
|
||||
|
||||
return (crop_top, crop_left), (crop_top + resize_height, crop_left + resize_width)
|
||||
|
||||
|
||||
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.rescale_noise_cfg
|
||||
def rescale_noise_cfg(noise_cfg, noise_pred_text, guidance_rescale=0.0):
|
||||
"""
|
||||
Rescale `noise_cfg` according to `guidance_rescale`. Based on findings of [Common Diffusion Noise Schedules and
|
||||
Sample Steps are Flawed](https://arxiv.org/pdf/2305.08891.pdf). See Section 3.4
|
||||
"""
|
||||
std_text = noise_pred_text.std(dim=list(range(1, noise_pred_text.ndim)), keepdim=True)
|
||||
std_cfg = noise_cfg.std(dim=list(range(1, noise_cfg.ndim)), keepdim=True)
|
||||
# rescale the results from guidance (fixes overexposure)
|
||||
noise_pred_rescaled = noise_cfg * (std_text / std_cfg)
|
||||
# mix with the original results from guidance by factor guidance_rescale to avoid "plain looking" images
|
||||
noise_cfg = guidance_rescale * noise_pred_rescaled + (1 - guidance_rescale) * noise_cfg
|
||||
return noise_cfg
|
||||
|
||||
|
||||
class HunyuanDiTPipeline(DiffusionPipeline):
|
||||
r"""
|
||||
Pipeline for English/Chinese-to-image generation using HunyuanDiT.
|
||||
|
||||
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
|
||||
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
|
||||
|
||||
HunyuanDiT uses two text encoders: [mT5](https://huggingface.co/google/mt5-base) and [bilingual CLIP](fine-tuned by
|
||||
ourselves)
|
||||
|
||||
Args:
|
||||
vae ([`AutoencoderKL`]):
|
||||
Variational Auto-Encoder (VAE) Model to encode and decode images to and from latent representations. We use
|
||||
`sdxl-vae-fp16-fix`.
|
||||
text_encoder (Optional[`~transformers.BertModel`, `~transformers.CLIPTextModel`]):
|
||||
Frozen text-encoder ([clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14)).
|
||||
HunyuanDiT uses a fine-tuned [bilingual CLIP].
|
||||
tokenizer (Optional[`~transformers.BertTokenizer`, `~transformers.CLIPTokenizer`]):
|
||||
A `BertTokenizer` or `CLIPTokenizer` to tokenize text.
|
||||
transformer ([`HunyuanDiT2DModel`]):
|
||||
The HunyuanDiT model designed by Tencent Hunyuan.
|
||||
text_encoder_2 (`T5EncoderModel`):
|
||||
The mT5 embedder. Specifically, it is 't5-v1_1-xxl'.
|
||||
tokenizer_2 (`MT5Tokenizer`):
|
||||
The tokenizer for the mT5 embedder.
|
||||
scheduler ([`DDPMScheduler`]):
|
||||
A scheduler to be used in combination with HunyuanDiT to denoise the encoded image latents.
|
||||
"""
|
||||
|
||||
model_cpu_offload_seq = "text_encoder->text_encoder_2->transformer->vae"
|
||||
_optional_components = [
|
||||
"safety_checker",
|
||||
"feature_extractor",
|
||||
"text_encoder_2",
|
||||
"tokenizer_2",
|
||||
"text_encoder",
|
||||
"tokenizer",
|
||||
]
|
||||
_exclude_from_cpu_offload = ["safety_checker"]
|
||||
_callback_tensor_inputs = [
|
||||
"latents",
|
||||
"prompt_embeds",
|
||||
"negative_prompt_embeds",
|
||||
"prompt_embeds_2",
|
||||
"negative_prompt_embeds_2",
|
||||
]
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
vae: AutoencoderKL,
|
||||
text_encoder: BertModel,
|
||||
tokenizer: BertTokenizer,
|
||||
transformer: HunyuanDiT2DModel,
|
||||
scheduler: DDPMScheduler,
|
||||
safety_checker: StableDiffusionSafetyChecker,
|
||||
feature_extractor: CLIPImageProcessor,
|
||||
requires_safety_checker: bool = True,
|
||||
text_encoder_2=T5EncoderModel,
|
||||
tokenizer_2=MT5Tokenizer,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
self.register_modules(
|
||||
vae=vae,
|
||||
text_encoder=text_encoder,
|
||||
tokenizer=tokenizer,
|
||||
tokenizer_2=tokenizer_2,
|
||||
transformer=transformer,
|
||||
scheduler=scheduler,
|
||||
safety_checker=safety_checker,
|
||||
feature_extractor=feature_extractor,
|
||||
text_encoder_2=text_encoder_2,
|
||||
)
|
||||
|
||||
if safety_checker is None and requires_safety_checker:
|
||||
logger.warning(
|
||||
f"You have disabled the safety checker for {self.__class__} by passing `safety_checker=None`. Ensure"
|
||||
" that you abide to the conditions of the Stable Diffusion license and do not expose unfiltered"
|
||||
" results in services or applications open to the public. Both the diffusers team and Hugging Face"
|
||||
" strongly recommend to keep the safety filter enabled in all public facing circumstances, disabling"
|
||||
" it only for use-cases that involve analyzing network behavior or auditing its results. For more"
|
||||
" information, please have a look at https://github.com/huggingface/diffusers/pull/254 ."
|
||||
)
|
||||
|
||||
if safety_checker is not None and feature_extractor is None:
|
||||
raise ValueError(
|
||||
"Make sure to define a feature extractor when loading {self.__class__} if you want to use the safety"
|
||||
" checker. If you do not want to use the safety checker, you can pass `'safety_checker=None'` instead."
|
||||
)
|
||||
|
||||
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
|
||||
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor)
|
||||
self.register_to_config(requires_safety_checker=requires_safety_checker)
|
||||
self.default_sample_size = self.transformer.config.sample_size
|
||||
|
||||
def encode_prompt(
|
||||
self,
|
||||
prompt: str,
|
||||
device: torch.device,
|
||||
dtype: torch.dtype,
|
||||
num_images_per_prompt: int = 1,
|
||||
do_classifier_free_guidance: bool = True,
|
||||
negative_prompt: Optional[str] = None,
|
||||
prompt_embeds: Optional[torch.Tensor] = None,
|
||||
negative_prompt_embeds: Optional[torch.Tensor] = None,
|
||||
prompt_attention_mask: Optional[torch.Tensor] = None,
|
||||
negative_prompt_attention_mask: Optional[torch.Tensor] = None,
|
||||
max_sequence_length: Optional[int] = None,
|
||||
text_encoder_index: int = 0,
|
||||
):
|
||||
r"""
|
||||
Encodes the prompt into text encoder hidden states.
|
||||
|
||||
Args:
|
||||
prompt (`str` or `List[str]`, *optional*):
|
||||
prompt to be encoded
|
||||
device: (`torch.device`):
|
||||
torch device
|
||||
dtype (`torch.dtype`):
|
||||
torch dtype
|
||||
num_images_per_prompt (`int`):
|
||||
number of images that should be generated per prompt
|
||||
do_classifier_free_guidance (`bool`):
|
||||
whether to use classifier free guidance or not
|
||||
negative_prompt (`str` or `List[str]`, *optional*):
|
||||
The prompt or prompts not to guide the image generation. If not defined, one has to pass
|
||||
`negative_prompt_embeds` instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is
|
||||
less than `1`).
|
||||
prompt_embeds (`torch.Tensor`, *optional*):
|
||||
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
|
||||
provided, text embeddings will be generated from `prompt` input argument.
|
||||
negative_prompt_embeds (`torch.Tensor`, *optional*):
|
||||
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
|
||||
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
|
||||
argument.
|
||||
prompt_attention_mask (`torch.Tensor`, *optional*):
|
||||
Attention mask for the prompt. Required when `prompt_embeds` is passed directly.
|
||||
negative_prompt_attention_mask (`torch.Tensor`, *optional*):
|
||||
Attention mask for the negative prompt. Required when `negative_prompt_embeds` is passed directly.
|
||||
max_sequence_length (`int`, *optional*): maximum sequence length to use for the prompt.
|
||||
text_encoder_index (`int`, *optional*):
|
||||
Index of the text encoder to use. `0` for clip and `1` for T5.
|
||||
"""
|
||||
tokenizers = [self.tokenizer, self.tokenizer_2]
|
||||
text_encoders = [self.text_encoder, self.text_encoder_2]
|
||||
|
||||
tokenizer = tokenizers[text_encoder_index]
|
||||
text_encoder = text_encoders[text_encoder_index]
|
||||
|
||||
if max_sequence_length is None:
|
||||
if text_encoder_index == 0:
|
||||
max_length = 77
|
||||
if text_encoder_index == 1:
|
||||
max_length = 256
|
||||
else:
|
||||
max_length = max_sequence_length
|
||||
|
||||
if prompt is not None and isinstance(prompt, str):
|
||||
batch_size = 1
|
||||
elif prompt is not None and isinstance(prompt, list):
|
||||
batch_size = len(prompt)
|
||||
else:
|
||||
batch_size = prompt_embeds.shape[0]
|
||||
|
||||
if prompt_embeds is None:
|
||||
text_inputs = tokenizer(
|
||||
prompt,
|
||||
padding="max_length",
|
||||
max_length=max_length,
|
||||
truncation=True,
|
||||
return_attention_mask=True,
|
||||
return_tensors="pt",
|
||||
)
|
||||
text_input_ids = text_inputs.input_ids
|
||||
untruncated_ids = tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
|
||||
|
||||
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
|
||||
text_input_ids, untruncated_ids
|
||||
):
|
||||
removed_text = tokenizer.batch_decode(untruncated_ids[:, tokenizer.model_max_length - 1 : -1])
|
||||
logger.warning(
|
||||
"The following part of your input was truncated because CLIP can only handle sequences up to"
|
||||
f" {tokenizer.model_max_length} tokens: {removed_text}"
|
||||
)
|
||||
|
||||
prompt_attention_mask = text_inputs.attention_mask.to(device)
|
||||
prompt_embeds = text_encoder(
|
||||
text_input_ids.to(device),
|
||||
attention_mask=prompt_attention_mask,
|
||||
)
|
||||
prompt_embeds = prompt_embeds[0]
|
||||
prompt_attention_mask = prompt_attention_mask.repeat(num_images_per_prompt, 1)
|
||||
|
||||
prompt_embeds = prompt_embeds.to(dtype=dtype, device=device)
|
||||
|
||||
bs_embed, seq_len, _ = prompt_embeds.shape
|
||||
# duplicate text embeddings for each generation per prompt, using mps friendly method
|
||||
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
|
||||
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
|
||||
|
||||
# get unconditional embeddings for classifier free guidance
|
||||
if do_classifier_free_guidance and negative_prompt_embeds is None:
|
||||
uncond_tokens: List[str]
|
||||
if negative_prompt is None:
|
||||
uncond_tokens = [""] * batch_size
|
||||
elif prompt is not None and type(prompt) is not type(negative_prompt):
|
||||
raise TypeError(
|
||||
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
|
||||
f" {type(prompt)}."
|
||||
)
|
||||
elif isinstance(negative_prompt, str):
|
||||
uncond_tokens = [negative_prompt]
|
||||
elif batch_size != len(negative_prompt):
|
||||
raise ValueError(
|
||||
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
|
||||
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
|
||||
" the batch size of `prompt`."
|
||||
)
|
||||
else:
|
||||
uncond_tokens = negative_prompt
|
||||
|
||||
max_length = prompt_embeds.shape[1]
|
||||
uncond_input = tokenizer(
|
||||
uncond_tokens,
|
||||
padding="max_length",
|
||||
max_length=max_length,
|
||||
truncation=True,
|
||||
return_tensors="pt",
|
||||
)
|
||||
|
||||
negative_prompt_attention_mask = uncond_input.attention_mask.to(device)
|
||||
negative_prompt_embeds = text_encoder(
|
||||
uncond_input.input_ids.to(device),
|
||||
attention_mask=negative_prompt_attention_mask,
|
||||
)
|
||||
negative_prompt_embeds = negative_prompt_embeds[0]
|
||||
negative_prompt_attention_mask = negative_prompt_attention_mask.repeat(num_images_per_prompt, 1)
|
||||
|
||||
if do_classifier_free_guidance:
|
||||
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
|
||||
seq_len = negative_prompt_embeds.shape[1]
|
||||
|
||||
negative_prompt_embeds = negative_prompt_embeds.to(dtype=dtype, device=device)
|
||||
|
||||
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
|
||||
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
|
||||
|
||||
return prompt_embeds, negative_prompt_embeds, prompt_attention_mask, negative_prompt_attention_mask
|
||||
|
||||
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.run_safety_checker
|
||||
def run_safety_checker(self, image, device, dtype):
|
||||
if self.safety_checker is None:
|
||||
has_nsfw_concept = None
|
||||
else:
|
||||
if torch.is_tensor(image):
|
||||
feature_extractor_input = self.image_processor.postprocess(image, output_type="pil")
|
||||
else:
|
||||
feature_extractor_input = self.image_processor.numpy_to_pil(image)
|
||||
safety_checker_input = self.feature_extractor(feature_extractor_input, return_tensors="pt").to(device)
|
||||
image, has_nsfw_concept = self.safety_checker(
|
||||
images=image, clip_input=safety_checker_input.pixel_values.to(dtype)
|
||||
)
|
||||
return image, has_nsfw_concept
|
||||
|
||||
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_extra_step_kwargs
|
||||
def prepare_extra_step_kwargs(self, generator, eta):
|
||||
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
|
||||
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
|
||||
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
|
||||
# and should be between [0, 1]
|
||||
|
||||
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
|
||||
extra_step_kwargs = {}
|
||||
if accepts_eta:
|
||||
extra_step_kwargs["eta"] = eta
|
||||
|
||||
# check if the scheduler accepts generator
|
||||
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
|
||||
if accepts_generator:
|
||||
extra_step_kwargs["generator"] = generator
|
||||
return extra_step_kwargs
|
||||
|
||||
def check_inputs(
|
||||
self,
|
||||
prompt,
|
||||
height,
|
||||
width,
|
||||
negative_prompt=None,
|
||||
prompt_embeds=None,
|
||||
negative_prompt_embeds=None,
|
||||
prompt_attention_mask=None,
|
||||
negative_prompt_attention_mask=None,
|
||||
prompt_embeds_2=None,
|
||||
negative_prompt_embeds_2=None,
|
||||
prompt_attention_mask_2=None,
|
||||
negative_prompt_attention_mask_2=None,
|
||||
callback_on_step_end_tensor_inputs=None,
|
||||
):
|
||||
if height % 8 != 0 or width % 8 != 0:
|
||||
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
|
||||
|
||||
if callback_on_step_end_tensor_inputs is not None and not all(
|
||||
k in self._callback_tensor_inputs for k in callback_on_step_end_tensor_inputs
|
||||
):
|
||||
raise ValueError(
|
||||
f"`callback_on_step_end_tensor_inputs` has to be in {self._callback_tensor_inputs}, but found {[k for k in callback_on_step_end_tensor_inputs if k not in self._callback_tensor_inputs]}"
|
||||
)
|
||||
|
||||
if prompt is not None and prompt_embeds is not None:
|
||||
raise ValueError(
|
||||
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
|
||||
" only forward one of the two."
|
||||
)
|
||||
elif prompt is None and prompt_embeds is None:
|
||||
raise ValueError(
|
||||
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
|
||||
)
|
||||
elif prompt is None and prompt_embeds_2 is None:
|
||||
raise ValueError(
|
||||
"Provide either `prompt` or `prompt_embeds_2`. Cannot leave both `prompt` and `prompt_embeds_2` undefined."
|
||||
)
|
||||
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
|
||||
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
|
||||
|
||||
if prompt_embeds is not None and prompt_attention_mask is None:
|
||||
raise ValueError("Must provide `prompt_attention_mask` when specifying `prompt_embeds`.")
|
||||
|
||||
if prompt_embeds_2 is not None and prompt_attention_mask_2 is None:
|
||||
raise ValueError("Must provide `prompt_attention_mask_2` when specifying `prompt_embeds_2`.")
|
||||
|
||||
if negative_prompt is not None and negative_prompt_embeds is not None:
|
||||
raise ValueError(
|
||||
f"Cannot forward both `negative_prompt`: {negative_prompt} and `negative_prompt_embeds`:"
|
||||
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
|
||||
)
|
||||
|
||||
if negative_prompt_embeds is not None and negative_prompt_attention_mask is None:
|
||||
raise ValueError("Must provide `negative_prompt_attention_mask` when specifying `negative_prompt_embeds`.")
|
||||
|
||||
if negative_prompt_embeds_2 is not None and negative_prompt_attention_mask_2 is None:
|
||||
raise ValueError(
|
||||
"Must provide `negative_prompt_attention_mask_2` when specifying `negative_prompt_embeds_2`."
|
||||
)
|
||||
if prompt_embeds is not None and negative_prompt_embeds is not None:
|
||||
if prompt_embeds.shape != negative_prompt_embeds.shape:
|
||||
raise ValueError(
|
||||
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
|
||||
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
|
||||
f" {negative_prompt_embeds.shape}."
|
||||
)
|
||||
if prompt_embeds_2 is not None and negative_prompt_embeds_2 is not None:
|
||||
if prompt_embeds_2.shape != negative_prompt_embeds_2.shape:
|
||||
raise ValueError(
|
||||
"`prompt_embeds_2` and `negative_prompt_embeds_2` must have the same shape when passed directly, but"
|
||||
f" got: `prompt_embeds_2` {prompt_embeds_2.shape} != `negative_prompt_embeds_2`"
|
||||
f" {negative_prompt_embeds_2.shape}."
|
||||
)
|
||||
|
||||
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_latents
|
||||
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
|
||||
shape = (
|
||||
batch_size,
|
||||
num_channels_latents,
|
||||
int(height) // self.vae_scale_factor,
|
||||
int(width) // self.vae_scale_factor,
|
||||
)
|
||||
if isinstance(generator, list) and len(generator) != batch_size:
|
||||
raise ValueError(
|
||||
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
|
||||
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
|
||||
)
|
||||
|
||||
if latents is None:
|
||||
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
|
||||
else:
|
||||
latents = latents.to(device)
|
||||
|
||||
# scale the initial noise by the standard deviation required by the scheduler
|
||||
latents = latents * self.scheduler.init_noise_sigma
|
||||
return latents
|
||||
|
||||
@property
|
||||
def guidance_scale(self):
|
||||
return self._guidance_scale
|
||||
|
||||
@property
|
||||
def guidance_rescale(self):
|
||||
return self._guidance_rescale
|
||||
|
||||
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
|
||||
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
|
||||
# corresponds to doing no classifier free guidance.
|
||||
@property
|
||||
def do_classifier_free_guidance(self):
|
||||
return self._guidance_scale > 1
|
||||
|
||||
@property
|
||||
def num_timesteps(self):
|
||||
return self._num_timesteps
|
||||
|
||||
@property
|
||||
def interrupt(self):
|
||||
return self._interrupt
|
||||
|
||||
@torch.no_grad()
|
||||
@replace_example_docstring(EXAMPLE_DOC_STRING)
|
||||
def __call__(
|
||||
self,
|
||||
prompt: Union[str, List[str]] = None,
|
||||
height: Optional[int] = None,
|
||||
width: Optional[int] = None,
|
||||
num_inference_steps: Optional[int] = 50,
|
||||
guidance_scale: Optional[float] = 5.0,
|
||||
negative_prompt: Optional[Union[str, List[str]]] = None,
|
||||
num_images_per_prompt: Optional[int] = 1,
|
||||
eta: Optional[float] = 0.0,
|
||||
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
|
||||
latents: Optional[torch.Tensor] = None,
|
||||
prompt_embeds: Optional[torch.Tensor] = None,
|
||||
prompt_embeds_2: Optional[torch.Tensor] = None,
|
||||
negative_prompt_embeds: Optional[torch.Tensor] = None,
|
||||
negative_prompt_embeds_2: Optional[torch.Tensor] = None,
|
||||
prompt_attention_mask: Optional[torch.Tensor] = None,
|
||||
prompt_attention_mask_2: Optional[torch.Tensor] = None,
|
||||
negative_prompt_attention_mask: Optional[torch.Tensor] = None,
|
||||
negative_prompt_attention_mask_2: Optional[torch.Tensor] = None,
|
||||
output_type: Optional[str] = "pil",
|
||||
return_dict: bool = True,
|
||||
callback_on_step_end: Optional[
|
||||
Union[Callable[[int, int, Dict], None], PipelineCallback, MultiPipelineCallbacks]
|
||||
] = None,
|
||||
callback_on_step_end_tensor_inputs: List[str] = ["latents"],
|
||||
guidance_rescale: float = 0.0,
|
||||
original_size: Optional[Tuple[int, int]] = (1024, 1024),
|
||||
target_size: Optional[Tuple[int, int]] = None,
|
||||
crops_coords_top_left: Tuple[int, int] = (0, 0),
|
||||
use_resolution_binning: bool = True,
|
||||
):
|
||||
r"""
|
||||
The call function to the pipeline for generation with HunyuanDiT.
|
||||
|
||||
Args:
|
||||
prompt (`str` or `List[str]`, *optional*):
|
||||
The prompt or prompts to guide image generation. If not defined, you need to pass `prompt_embeds`.
|
||||
height (`int`):
|
||||
The height in pixels of the generated image.
|
||||
width (`int`):
|
||||
The width in pixels of the generated image.
|
||||
num_inference_steps (`int`, *optional*, defaults to 50):
|
||||
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
|
||||
expense of slower inference. This parameter is modulated by `strength`.
|
||||
guidance_scale (`float`, *optional*, defaults to 7.5):
|
||||
A higher guidance scale value encourages the model to generate images closely linked to the text
|
||||
`prompt` at the expense of lower image quality. Guidance scale is enabled when `guidance_scale > 1`.
|
||||
negative_prompt (`str` or `List[str]`, *optional*):
|
||||
The prompt or prompts to guide what to not include in image generation. If not defined, you need to
|
||||
pass `negative_prompt_embeds` instead. Ignored when not using guidance (`guidance_scale < 1`).
|
||||
num_images_per_prompt (`int`, *optional*, defaults to 1):
|
||||
The number of images to generate per prompt.
|
||||
eta (`float`, *optional*, defaults to 0.0):
|
||||
Corresponds to parameter eta (η) from the [DDIM](https://arxiv.org/abs/2010.02502) paper. Only applies
|
||||
to the [`~schedulers.DDIMScheduler`], and is ignored in other schedulers.
|
||||
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
|
||||
A [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make
|
||||
generation deterministic.
|
||||
prompt_embeds (`torch.Tensor`, *optional*):
|
||||
Pre-generated text embeddings. Can be used to easily tweak text inputs (prompt weighting). If not
|
||||
provided, text embeddings are generated from the `prompt` input argument.
|
||||
prompt_embeds_2 (`torch.Tensor`, *optional*):
|
||||
Pre-generated text embeddings. Can be used to easily tweak text inputs (prompt weighting). If not
|
||||
provided, text embeddings are generated from the `prompt` input argument.
|
||||
negative_prompt_embeds (`torch.Tensor`, *optional*):
|
||||
Pre-generated negative text embeddings. Can be used to easily tweak text inputs (prompt weighting). If
|
||||
not provided, `negative_prompt_embeds` are generated from the `negative_prompt` input argument.
|
||||
negative_prompt_embeds_2 (`torch.Tensor`, *optional*):
|
||||
Pre-generated negative text embeddings. Can be used to easily tweak text inputs (prompt weighting). If
|
||||
not provided, `negative_prompt_embeds` are generated from the `negative_prompt` input argument.
|
||||
prompt_attention_mask (`torch.Tensor`, *optional*):
|
||||
Attention mask for the prompt. Required when `prompt_embeds` is passed directly.
|
||||
prompt_attention_mask_2 (`torch.Tensor`, *optional*):
|
||||
Attention mask for the prompt. Required when `prompt_embeds_2` is passed directly.
|
||||
negative_prompt_attention_mask (`torch.Tensor`, *optional*):
|
||||
Attention mask for the negative prompt. Required when `negative_prompt_embeds` is passed directly.
|
||||
negative_prompt_attention_mask_2 (`torch.Tensor`, *optional*):
|
||||
Attention mask for the negative prompt. Required when `negative_prompt_embeds_2` is passed directly.
|
||||
output_type (`str`, *optional*, defaults to `"pil"`):
|
||||
The output format of the generated image. Choose between `PIL.Image` or `np.array`.
|
||||
return_dict (`bool`, *optional*, defaults to `True`):
|
||||
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
|
||||
plain tuple.
|
||||
callback_on_step_end (`Callable[[int, int, Dict], None]`, `PipelineCallback`, `MultiPipelineCallbacks`, *optional*):
|
||||
A callback function or a list of callback functions to be called at the end of each denoising step.
|
||||
callback_on_step_end_tensor_inputs (`List[str]`, *optional*):
|
||||
A list of tensor inputs that should be passed to the callback function. If not defined, all tensor
|
||||
inputs will be passed.
|
||||
guidance_rescale (`float`, *optional*, defaults to 0.0):
|
||||
Rescale the noise_cfg according to `guidance_rescale`. Based on findings of [Common Diffusion Noise
|
||||
Schedules and Sample Steps are Flawed](https://arxiv.org/pdf/2305.08891.pdf). See Section 3.4
|
||||
original_size (`Tuple[int, int]`, *optional*, defaults to `(1024, 1024)`):
|
||||
The original size of the image. Used to calculate the time ids.
|
||||
target_size (`Tuple[int, int]`, *optional*):
|
||||
The target size of the image. Used to calculate the time ids.
|
||||
crops_coords_top_left (`Tuple[int, int]`, *optional*, defaults to `(0, 0)`):
|
||||
The top left coordinates of the crop. Used to calculate the time ids.
|
||||
use_resolution_binning (`bool`, *optional*, defaults to `True`):
|
||||
Whether to use resolution binning or not. If `True`, the input resolution will be mapped to the closest
|
||||
standard resolution. Supported resolutions are 1024x1024, 1280x1280, 1024x768, 1152x864, 1280x960,
|
||||
768x1024, 864x1152, 960x1280, 1280x768, and 768x1280. It is recommended to set this to `True`.
|
||||
|
||||
Examples:
|
||||
|
||||
Returns:
|
||||
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
|
||||
If `return_dict` is `True`, [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] is returned,
|
||||
otherwise a `tuple` is returned where the first element is a list with the generated images and the
|
||||
second element is a list of `bool`s indicating whether the corresponding generated image contains
|
||||
"not-safe-for-work" (nsfw) content.
|
||||
"""
|
||||
|
||||
if isinstance(callback_on_step_end, (PipelineCallback, MultiPipelineCallbacks)):
|
||||
callback_on_step_end_tensor_inputs = callback_on_step_end.tensor_inputs
|
||||
|
||||
# 0. default height and width
|
||||
height = height or self.default_sample_size * self.vae_scale_factor
|
||||
width = width or self.default_sample_size * self.vae_scale_factor
|
||||
height = int((height // 16) * 16)
|
||||
width = int((width // 16) * 16)
|
||||
|
||||
if use_resolution_binning and (height, width) not in SUPPORTED_SHAPE:
|
||||
width, height = map_to_standard_shapes(width, height)
|
||||
height = int(height)
|
||||
width = int(width)
|
||||
logger.warning(f"Reshaped to (height, width)=({height}, {width}), Supported shapes are {SUPPORTED_SHAPE}")
|
||||
|
||||
# 1. Check inputs. Raise error if not correct
|
||||
self.check_inputs(
|
||||
prompt,
|
||||
height,
|
||||
width,
|
||||
negative_prompt,
|
||||
prompt_embeds,
|
||||
negative_prompt_embeds,
|
||||
prompt_attention_mask,
|
||||
negative_prompt_attention_mask,
|
||||
prompt_embeds_2,
|
||||
negative_prompt_embeds_2,
|
||||
prompt_attention_mask_2,
|
||||
negative_prompt_attention_mask_2,
|
||||
callback_on_step_end_tensor_inputs,
|
||||
)
|
||||
self._guidance_scale = guidance_scale
|
||||
self._guidance_rescale = guidance_rescale
|
||||
self._interrupt = False
|
||||
|
||||
# 2. Define call parameters
|
||||
if prompt is not None and isinstance(prompt, str):
|
||||
batch_size = 1
|
||||
elif prompt is not None and isinstance(prompt, list):
|
||||
batch_size = len(prompt)
|
||||
else:
|
||||
batch_size = prompt_embeds.shape[0]
|
||||
|
||||
device = self._execution_device
|
||||
|
||||
# 3. Encode input prompt
|
||||
|
||||
(
|
||||
prompt_embeds,
|
||||
negative_prompt_embeds,
|
||||
prompt_attention_mask,
|
||||
negative_prompt_attention_mask,
|
||||
) = self.encode_prompt(
|
||||
prompt=prompt,
|
||||
device=device,
|
||||
dtype=self.transformer.dtype,
|
||||
num_images_per_prompt=num_images_per_prompt,
|
||||
do_classifier_free_guidance=self.do_classifier_free_guidance,
|
||||
negative_prompt=negative_prompt,
|
||||
prompt_embeds=prompt_embeds,
|
||||
negative_prompt_embeds=negative_prompt_embeds,
|
||||
prompt_attention_mask=prompt_attention_mask,
|
||||
negative_prompt_attention_mask=negative_prompt_attention_mask,
|
||||
max_sequence_length=77,
|
||||
text_encoder_index=0,
|
||||
)
|
||||
(
|
||||
prompt_embeds_2,
|
||||
negative_prompt_embeds_2,
|
||||
prompt_attention_mask_2,
|
||||
negative_prompt_attention_mask_2,
|
||||
) = self.encode_prompt(
|
||||
prompt=prompt,
|
||||
device=device,
|
||||
dtype=self.transformer.dtype,
|
||||
num_images_per_prompt=num_images_per_prompt,
|
||||
do_classifier_free_guidance=self.do_classifier_free_guidance,
|
||||
negative_prompt=negative_prompt,
|
||||
prompt_embeds=prompt_embeds_2,
|
||||
negative_prompt_embeds=negative_prompt_embeds_2,
|
||||
prompt_attention_mask=prompt_attention_mask_2,
|
||||
negative_prompt_attention_mask=negative_prompt_attention_mask_2,
|
||||
max_sequence_length=256,
|
||||
text_encoder_index=1,
|
||||
)
|
||||
|
||||
# 4. Prepare timesteps
|
||||
self.scheduler.set_timesteps(num_inference_steps, device=device)
|
||||
timesteps = self.scheduler.timesteps
|
||||
|
||||
# 5. Prepare latent variables
|
||||
num_channels_latents = self.transformer.config.in_channels
|
||||
latents = self.prepare_latents(
|
||||
batch_size * num_images_per_prompt,
|
||||
num_channels_latents,
|
||||
height,
|
||||
width,
|
||||
prompt_embeds.dtype,
|
||||
device,
|
||||
generator,
|
||||
latents,
|
||||
)
|
||||
|
||||
# 6. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
|
||||
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
|
||||
|
||||
# 7 create image_rotary_emb, style embedding & time ids
|
||||
grid_height = height // 8 // self.transformer.config.patch_size
|
||||
grid_width = width // 8 // self.transformer.config.patch_size
|
||||
base_size = 512 // 8 // self.transformer.config.patch_size
|
||||
grid_crops_coords = get_resize_crop_region_for_grid((grid_height, grid_width), base_size)
|
||||
image_rotary_emb = get_2d_rotary_pos_embed(
|
||||
self.transformer.inner_dim // self.transformer.num_heads, grid_crops_coords, (grid_height, grid_width)
|
||||
)
|
||||
|
||||
style = torch.tensor([0], device=device)
|
||||
|
||||
target_size = target_size or (height, width)
|
||||
add_time_ids = list(original_size + target_size + crops_coords_top_left)
|
||||
add_time_ids = torch.tensor([add_time_ids], dtype=prompt_embeds.dtype)
|
||||
|
||||
if self.do_classifier_free_guidance:
|
||||
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds])
|
||||
prompt_attention_mask = torch.cat([negative_prompt_attention_mask, prompt_attention_mask])
|
||||
prompt_embeds_2 = torch.cat([negative_prompt_embeds_2, prompt_embeds_2])
|
||||
prompt_attention_mask_2 = torch.cat([negative_prompt_attention_mask_2, prompt_attention_mask_2])
|
||||
add_time_ids = torch.cat([add_time_ids] * 2, dim=0)
|
||||
style = torch.cat([style] * 2, dim=0)
|
||||
|
||||
prompt_embeds = prompt_embeds.to(device=device)
|
||||
prompt_attention_mask = prompt_attention_mask.to(device=device)
|
||||
prompt_embeds_2 = prompt_embeds_2.to(device=device)
|
||||
prompt_attention_mask_2 = prompt_attention_mask_2.to(device=device)
|
||||
add_time_ids = add_time_ids.to(dtype=prompt_embeds.dtype, device=device).repeat(
|
||||
batch_size * num_images_per_prompt, 1
|
||||
)
|
||||
style = style.to(device=device).repeat(batch_size * num_images_per_prompt)
|
||||
|
||||
# 8. Denoising loop
|
||||
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
|
||||
self._num_timesteps = len(timesteps)
|
||||
with self.progress_bar(total=num_inference_steps) as progress_bar:
|
||||
for i, t in enumerate(timesteps):
|
||||
if self.interrupt:
|
||||
continue
|
||||
|
||||
# expand the latents if we are doing classifier free guidance
|
||||
latent_model_input = torch.cat([latents] * 2) if self.do_classifier_free_guidance else latents
|
||||
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
|
||||
|
||||
# expand scalar t to 1-D tensor to match the 1st dim of latent_model_input
|
||||
t_expand = torch.tensor([t] * latent_model_input.shape[0], device=device).to(
|
||||
dtype=latent_model_input.dtype
|
||||
)
|
||||
|
||||
# predict the noise residual
|
||||
noise_pred = self.transformer(
|
||||
latent_model_input,
|
||||
t_expand,
|
||||
encoder_hidden_states=prompt_embeds,
|
||||
text_embedding_mask=prompt_attention_mask,
|
||||
encoder_hidden_states_t5=prompt_embeds_2,
|
||||
text_embedding_mask_t5=prompt_attention_mask_2,
|
||||
image_meta_size=add_time_ids,
|
||||
style=style,
|
||||
image_rotary_emb=image_rotary_emb,
|
||||
return_dict=False,
|
||||
)[0]
|
||||
|
||||
noise_pred, _ = noise_pred.chunk(2, dim=1)
|
||||
|
||||
# perform guidance
|
||||
if self.do_classifier_free_guidance:
|
||||
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
|
||||
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
|
||||
|
||||
if self.do_classifier_free_guidance and guidance_rescale > 0.0:
|
||||
# Based on 3.4. in https://arxiv.org/pdf/2305.08891.pdf
|
||||
noise_pred = rescale_noise_cfg(noise_pred, noise_pred_text, guidance_rescale=guidance_rescale)
|
||||
|
||||
# compute the previous noisy sample x_t -> x_t-1
|
||||
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs, return_dict=False)[0]
|
||||
|
||||
if callback_on_step_end is not None:
|
||||
callback_kwargs = {}
|
||||
for k in callback_on_step_end_tensor_inputs:
|
||||
callback_kwargs[k] = locals()[k]
|
||||
callback_outputs = callback_on_step_end(self, i, t, callback_kwargs)
|
||||
|
||||
latents = callback_outputs.pop("latents", latents)
|
||||
prompt_embeds = callback_outputs.pop("prompt_embeds", prompt_embeds)
|
||||
negative_prompt_embeds = callback_outputs.pop("negative_prompt_embeds", negative_prompt_embeds)
|
||||
prompt_embeds_2 = callback_outputs.pop("prompt_embeds_2", prompt_embeds_2)
|
||||
negative_prompt_embeds_2 = callback_outputs.pop(
|
||||
"negative_prompt_embeds_2", negative_prompt_embeds_2
|
||||
)
|
||||
|
||||
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
|
||||
progress_bar.update()
|
||||
|
||||
if XLA_AVAILABLE:
|
||||
xm.mark_step()
|
||||
|
||||
if not output_type == "latent":
|
||||
image = self.vae.decode(latents / self.vae.config.scaling_factor, return_dict=False)[0]
|
||||
image, has_nsfw_concept = self.run_safety_checker(image, device, prompt_embeds.dtype)
|
||||
else:
|
||||
image = latents
|
||||
has_nsfw_concept = None
|
||||
|
||||
if has_nsfw_concept is None:
|
||||
do_denormalize = [True] * image.shape[0]
|
||||
else:
|
||||
do_denormalize = [not has_nsfw for has_nsfw in has_nsfw_concept]
|
||||
|
||||
image = self.image_processor.postprocess(image, output_type=output_type, do_denormalize=do_denormalize)
|
||||
|
||||
# Offload all models
|
||||
self.maybe_free_model_hooks()
|
||||
|
||||
if not return_dict:
|
||||
return (image, has_nsfw_concept)
|
||||
|
||||
return StableDiffusionPipelineOutput(images=image, nsfw_content_detected=has_nsfw_concept)
|
||||
@@ -0,0 +1,50 @@
|
||||
from typing import TYPE_CHECKING
|
||||
|
||||
from ...utils import (
|
||||
DIFFUSERS_SLOW_IMPORT,
|
||||
OptionalDependencyNotAvailable,
|
||||
_LazyModule,
|
||||
get_objects_from_module,
|
||||
is_torch_available,
|
||||
is_transformers_available,
|
||||
)
|
||||
|
||||
|
||||
_dummy_objects = {}
|
||||
_import_structure = {}
|
||||
|
||||
try:
|
||||
if not (is_transformers_available() and is_torch_available()):
|
||||
raise OptionalDependencyNotAvailable()
|
||||
except OptionalDependencyNotAvailable:
|
||||
from ...utils import dummy_torch_and_transformers_objects # noqa F403
|
||||
|
||||
_dummy_objects.update(get_objects_from_module(dummy_torch_and_transformers_objects))
|
||||
else:
|
||||
_import_structure["marigold_image_processing"] = ["MarigoldImageProcessor"]
|
||||
_import_structure["pipeline_marigold_depth"] = ["MarigoldDepthOutput", "MarigoldDepthPipeline"]
|
||||
_import_structure["pipeline_marigold_normals"] = ["MarigoldNormalsOutput", "MarigoldNormalsPipeline"]
|
||||
|
||||
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
|
||||
try:
|
||||
if not (is_transformers_available() and is_torch_available()):
|
||||
raise OptionalDependencyNotAvailable()
|
||||
|
||||
except OptionalDependencyNotAvailable:
|
||||
from ...utils.dummy_torch_and_transformers_objects import *
|
||||
else:
|
||||
from .marigold_image_processing import MarigoldImageProcessor
|
||||
from .pipeline_marigold_depth import MarigoldDepthOutput, MarigoldDepthPipeline
|
||||
from .pipeline_marigold_normals import MarigoldNormalsOutput, MarigoldNormalsPipeline
|
||||
|
||||
else:
|
||||
import sys
|
||||
|
||||
sys.modules[__name__] = _LazyModule(
|
||||
__name__,
|
||||
globals()["__file__"],
|
||||
_import_structure,
|
||||
module_spec=__spec__,
|
||||
)
|
||||
for name, value in _dummy_objects.items():
|
||||
setattr(sys.modules[__name__], name, value)
|
||||
@@ -0,0 +1,561 @@
|
||||
from typing import List, Optional, Tuple, Union
|
||||
|
||||
import numpy as np
|
||||
import PIL
|
||||
import torch
|
||||
import torch.nn.functional as F
|
||||
from PIL import Image
|
||||
|
||||
from ... import ConfigMixin
|
||||
from ...configuration_utils import register_to_config
|
||||
from ...image_processor import PipelineImageInput
|
||||
from ...utils import CONFIG_NAME, logging
|
||||
from ...utils.import_utils import is_matplotlib_available
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
||||
|
||||
class MarigoldImageProcessor(ConfigMixin):
|
||||
config_name = CONFIG_NAME
|
||||
|
||||
@register_to_config
|
||||
def __init__(
|
||||
self,
|
||||
vae_scale_factor: int = 8,
|
||||
do_normalize: bool = True,
|
||||
do_range_check: bool = True,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
@staticmethod
|
||||
def expand_tensor_or_array(images: Union[torch.Tensor, np.ndarray]) -> Union[torch.Tensor, np.ndarray]:
|
||||
"""
|
||||
Expand a tensor or array to a specified number of images.
|
||||
"""
|
||||
if isinstance(images, np.ndarray):
|
||||
if images.ndim == 2: # [H,W] -> [1,H,W,1]
|
||||
images = images[None, ..., None]
|
||||
if images.ndim == 3: # [H,W,C] -> [1,H,W,C]
|
||||
images = images[None]
|
||||
elif isinstance(images, torch.Tensor):
|
||||
if images.ndim == 2: # [H,W] -> [1,1,H,W]
|
||||
images = images[None, None]
|
||||
elif images.ndim == 3: # [1,H,W] -> [1,1,H,W]
|
||||
images = images[None]
|
||||
else:
|
||||
raise ValueError(f"Unexpected input type: {type(images)}")
|
||||
return images
|
||||
|
||||
@staticmethod
|
||||
def pt_to_numpy(images: torch.Tensor) -> np.ndarray:
|
||||
"""
|
||||
Convert a PyTorch tensor to a NumPy image.
|
||||
"""
|
||||
images = images.cpu().permute(0, 2, 3, 1).float().numpy()
|
||||
return images
|
||||
|
||||
@staticmethod
|
||||
def numpy_to_pt(images: np.ndarray) -> torch.Tensor:
|
||||
"""
|
||||
Convert a NumPy image to a PyTorch tensor.
|
||||
"""
|
||||
if np.issubdtype(images.dtype, np.integer) and not np.issubdtype(images.dtype, np.unsignedinteger):
|
||||
raise ValueError(f"Input image dtype={images.dtype} cannot be a signed integer.")
|
||||
if np.issubdtype(images.dtype, np.complexfloating):
|
||||
raise ValueError(f"Input image dtype={images.dtype} cannot be complex.")
|
||||
if np.issubdtype(images.dtype, bool):
|
||||
raise ValueError(f"Input image dtype={images.dtype} cannot be boolean.")
|
||||
|
||||
images = torch.from_numpy(images.transpose(0, 3, 1, 2))
|
||||
return images
|
||||
|
||||
@staticmethod
|
||||
def resize_antialias(
|
||||
image: torch.Tensor, size: Tuple[int, int], mode: str, is_aa: Optional[bool] = None
|
||||
) -> torch.Tensor:
|
||||
if not torch.is_tensor(image):
|
||||
raise ValueError(f"Invalid input type={type(image)}.")
|
||||
if not torch.is_floating_point(image):
|
||||
raise ValueError(f"Invalid input dtype={image.dtype}.")
|
||||
if image.dim() != 4:
|
||||
raise ValueError(f"Invalid input dimensions; shape={image.shape}.")
|
||||
|
||||
antialias = is_aa and mode in ("bilinear", "bicubic")
|
||||
image = F.interpolate(image, size, mode=mode, antialias=antialias)
|
||||
|
||||
return image
|
||||
|
||||
@staticmethod
|
||||
def resize_to_max_edge(image: torch.Tensor, max_edge_sz: int, mode: str) -> torch.Tensor:
|
||||
if not torch.is_tensor(image):
|
||||
raise ValueError(f"Invalid input type={type(image)}.")
|
||||
if not torch.is_floating_point(image):
|
||||
raise ValueError(f"Invalid input dtype={image.dtype}.")
|
||||
if image.dim() != 4:
|
||||
raise ValueError(f"Invalid input dimensions; shape={image.shape}.")
|
||||
|
||||
h, w = image.shape[-2:]
|
||||
max_orig = max(h, w)
|
||||
new_h = h * max_edge_sz // max_orig
|
||||
new_w = w * max_edge_sz // max_orig
|
||||
|
||||
if new_h == 0 or new_w == 0:
|
||||
raise ValueError(f"Extreme aspect ratio of the input image: [{w} x {h}]")
|
||||
|
||||
image = MarigoldImageProcessor.resize_antialias(image, (new_h, new_w), mode, is_aa=True)
|
||||
|
||||
return image
|
||||
|
||||
@staticmethod
|
||||
def pad_image(image: torch.Tensor, align: int) -> Tuple[torch.Tensor, Tuple[int, int]]:
|
||||
if not torch.is_tensor(image):
|
||||
raise ValueError(f"Invalid input type={type(image)}.")
|
||||
if not torch.is_floating_point(image):
|
||||
raise ValueError(f"Invalid input dtype={image.dtype}.")
|
||||
if image.dim() != 4:
|
||||
raise ValueError(f"Invalid input dimensions; shape={image.shape}.")
|
||||
|
||||
h, w = image.shape[-2:]
|
||||
ph, pw = -h % align, -w % align
|
||||
|
||||
image = F.pad(image, (0, pw, 0, ph), mode="replicate")
|
||||
|
||||
return image, (ph, pw)
|
||||
|
||||
@staticmethod
|
||||
def unpad_image(image: torch.Tensor, padding: Tuple[int, int]) -> torch.Tensor:
|
||||
if not torch.is_tensor(image):
|
||||
raise ValueError(f"Invalid input type={type(image)}.")
|
||||
if not torch.is_floating_point(image):
|
||||
raise ValueError(f"Invalid input dtype={image.dtype}.")
|
||||
if image.dim() != 4:
|
||||
raise ValueError(f"Invalid input dimensions; shape={image.shape}.")
|
||||
|
||||
ph, pw = padding
|
||||
uh = None if ph == 0 else -ph
|
||||
uw = None if pw == 0 else -pw
|
||||
|
||||
image = image[:, :, :uh, :uw]
|
||||
|
||||
return image
|
||||
|
||||
@staticmethod
|
||||
def load_image_canonical(
|
||||
image: Union[torch.Tensor, np.ndarray, Image.Image],
|
||||
device: torch.device = torch.device("cpu"),
|
||||
dtype: torch.dtype = torch.float32,
|
||||
) -> Tuple[torch.Tensor, int]:
|
||||
if isinstance(image, Image.Image):
|
||||
image = np.array(image)
|
||||
|
||||
image_dtype_max = None
|
||||
if isinstance(image, (np.ndarray, torch.Tensor)):
|
||||
image = MarigoldImageProcessor.expand_tensor_or_array(image)
|
||||
if image.ndim != 4:
|
||||
raise ValueError("Input image is not 2-, 3-, or 4-dimensional.")
|
||||
if isinstance(image, np.ndarray):
|
||||
if np.issubdtype(image.dtype, np.integer) and not np.issubdtype(image.dtype, np.unsignedinteger):
|
||||
raise ValueError(f"Input image dtype={image.dtype} cannot be a signed integer.")
|
||||
if np.issubdtype(image.dtype, np.complexfloating):
|
||||
raise ValueError(f"Input image dtype={image.dtype} cannot be complex.")
|
||||
if np.issubdtype(image.dtype, bool):
|
||||
raise ValueError(f"Input image dtype={image.dtype} cannot be boolean.")
|
||||
if np.issubdtype(image.dtype, np.unsignedinteger):
|
||||
image_dtype_max = np.iinfo(image.dtype).max
|
||||
image = image.astype(np.float32) # because torch does not have unsigned dtypes beyond torch.uint8
|
||||
image = MarigoldImageProcessor.numpy_to_pt(image)
|
||||
|
||||
if torch.is_tensor(image) and not torch.is_floating_point(image) and image_dtype_max is None:
|
||||
if image.dtype != torch.uint8:
|
||||
raise ValueError(f"Image dtype={image.dtype} is not supported.")
|
||||
image_dtype_max = 255
|
||||
|
||||
if not torch.is_tensor(image):
|
||||
raise ValueError(f"Input type unsupported: {type(image)}.")
|
||||
|
||||
if image.shape[1] == 1:
|
||||
image = image.repeat(1, 3, 1, 1) # [N,1,H,W] -> [N,3,H,W]
|
||||
if image.shape[1] != 3:
|
||||
raise ValueError(f"Input image is not 1- or 3-channel: {image.shape}.")
|
||||
|
||||
image = image.to(device=device, dtype=dtype)
|
||||
|
||||
if image_dtype_max is not None:
|
||||
image = image / image_dtype_max
|
||||
|
||||
return image
|
||||
|
||||
@staticmethod
|
||||
def check_image_values_range(image: torch.Tensor) -> None:
|
||||
if not torch.is_tensor(image):
|
||||
raise ValueError(f"Invalid input type={type(image)}.")
|
||||
if not torch.is_floating_point(image):
|
||||
raise ValueError(f"Invalid input dtype={image.dtype}.")
|
||||
if image.min().item() < 0.0 or image.max().item() > 1.0:
|
||||
raise ValueError("Input image data is partially outside of the [0,1] range.")
|
||||
|
||||
def preprocess(
|
||||
self,
|
||||
image: PipelineImageInput,
|
||||
processing_resolution: Optional[int] = None,
|
||||
resample_method_input: str = "bilinear",
|
||||
device: torch.device = torch.device("cpu"),
|
||||
dtype: torch.dtype = torch.float32,
|
||||
):
|
||||
if isinstance(image, list):
|
||||
images = None
|
||||
for i, img in enumerate(image):
|
||||
img = self.load_image_canonical(img, device, dtype) # [N,3,H,W]
|
||||
if images is None:
|
||||
images = img
|
||||
else:
|
||||
if images.shape[2:] != img.shape[2:]:
|
||||
raise ValueError(
|
||||
f"Input image[{i}] has incompatible dimensions {img.shape[2:]} with the previous images "
|
||||
f"{images.shape[2:]}"
|
||||
)
|
||||
images = torch.cat((images, img), dim=0)
|
||||
image = images
|
||||
del images
|
||||
else:
|
||||
image = self.load_image_canonical(image, device, dtype) # [N,3,H,W]
|
||||
|
||||
original_resolution = image.shape[2:]
|
||||
|
||||
if self.config.do_range_check:
|
||||
self.check_image_values_range(image)
|
||||
|
||||
if self.config.do_normalize:
|
||||
image = image * 2.0 - 1.0
|
||||
|
||||
if processing_resolution is not None and processing_resolution > 0:
|
||||
image = self.resize_to_max_edge(image, processing_resolution, resample_method_input) # [N,3,PH,PW]
|
||||
|
||||
image, padding = self.pad_image(image, self.config.vae_scale_factor) # [N,3,PPH,PPW]
|
||||
|
||||
return image, padding, original_resolution
|
||||
|
||||
@staticmethod
|
||||
def colormap(
|
||||
image: Union[np.ndarray, torch.Tensor],
|
||||
cmap: str = "Spectral",
|
||||
bytes: bool = False,
|
||||
_force_method: Optional[str] = None,
|
||||
) -> Union[np.ndarray, torch.Tensor]:
|
||||
"""
|
||||
Converts a monochrome image into an RGB image by applying the specified colormap. This function mimics the
|
||||
behavior of matplotlib.colormaps, but allows the user to use the most discriminative color map "Spectral"
|
||||
without having to install or import matplotlib. For all other cases, the function will attempt to use the
|
||||
native implementation.
|
||||
|
||||
Args:
|
||||
image: 2D tensor of values between 0 and 1, either as np.ndarray or torch.Tensor.
|
||||
cmap: Colormap name.
|
||||
bytes: Whether to return the output as uint8 or floating point image.
|
||||
_force_method:
|
||||
Can be used to specify whether to use the native implementation (`"matplotlib"`), the efficient custom
|
||||
implementation of the "Spectral" color map (`"custom"`), or rely on autodetection (`None`, default).
|
||||
|
||||
Returns:
|
||||
An RGB-colorized tensor corresponding to the input image.
|
||||
"""
|
||||
if not (torch.is_tensor(image) or isinstance(image, np.ndarray)):
|
||||
raise ValueError("Argument must be a numpy array or torch tensor.")
|
||||
if _force_method not in (None, "matplotlib", "custom"):
|
||||
raise ValueError("_force_method must be either `None`, `'matplotlib'` or `'custom'`.")
|
||||
|
||||
def method_matplotlib(image, cmap, bytes=False):
|
||||
if is_matplotlib_available():
|
||||
import matplotlib
|
||||
else:
|
||||
return None
|
||||
|
||||
arg_is_pt, device = torch.is_tensor(image), None
|
||||
if arg_is_pt:
|
||||
image, device = image.cpu().numpy(), image.device
|
||||
|
||||
if cmap not in matplotlib.colormaps:
|
||||
raise ValueError(
|
||||
f"Unexpected color map {cmap}; available options are: {', '.join(list(matplotlib.colormaps.keys()))}"
|
||||
)
|
||||
|
||||
cmap = matplotlib.colormaps[cmap]
|
||||
out = cmap(image, bytes=bytes) # [?,4]
|
||||
out = out[..., :3] # [?,3]
|
||||
|
||||
if arg_is_pt:
|
||||
out = torch.tensor(out, device=device)
|
||||
|
||||
return out
|
||||
|
||||
def method_custom(image, cmap, bytes=False):
|
||||
arg_is_np = isinstance(image, np.ndarray)
|
||||
if arg_is_np:
|
||||
image = torch.tensor(image)
|
||||
if image.dtype == torch.uint8:
|
||||
image = image.float() / 255
|
||||
else:
|
||||
image = image.float()
|
||||
|
||||
if cmap != "Spectral":
|
||||
raise ValueError("Only 'Spectral' color map is available without installing matplotlib.")
|
||||
|
||||
_Spectral_data = ( # Taken from matplotlib/_cm.py
|
||||
(0.61960784313725492, 0.003921568627450980, 0.25882352941176473), # 0.0 -> [0]
|
||||
(0.83529411764705885, 0.24313725490196078, 0.30980392156862746),
|
||||
(0.95686274509803926, 0.42745098039215684, 0.2627450980392157),
|
||||
(0.99215686274509807, 0.68235294117647061, 0.38039215686274508),
|
||||
(0.99607843137254903, 0.8784313725490196, 0.54509803921568623),
|
||||
(1.0, 1.0, 0.74901960784313726),
|
||||
(0.90196078431372551, 0.96078431372549022, 0.59607843137254901),
|
||||
(0.6705882352941176, 0.8666666666666667, 0.64313725490196083),
|
||||
(0.4, 0.76078431372549016, 0.6470588235294118),
|
||||
(0.19607843137254902, 0.53333333333333333, 0.74117647058823533),
|
||||
(0.36862745098039218, 0.30980392156862746, 0.63529411764705879), # 1.0 -> [K-1]
|
||||
)
|
||||
|
||||
cmap = torch.tensor(_Spectral_data, dtype=torch.float, device=image.device) # [K,3]
|
||||
K = cmap.shape[0]
|
||||
|
||||
pos = image.clamp(min=0, max=1) * (K - 1)
|
||||
left = pos.long()
|
||||
right = (left + 1).clamp(max=K - 1)
|
||||
|
||||
d = (pos - left.float()).unsqueeze(-1)
|
||||
left_colors = cmap[left]
|
||||
right_colors = cmap[right]
|
||||
|
||||
out = (1 - d) * left_colors + d * right_colors
|
||||
|
||||
if bytes:
|
||||
out = (out * 255).to(torch.uint8)
|
||||
|
||||
if arg_is_np:
|
||||
out = out.numpy()
|
||||
|
||||
return out
|
||||
|
||||
if _force_method is None and torch.is_tensor(image) and cmap == "Spectral":
|
||||
return method_custom(image, cmap, bytes)
|
||||
|
||||
out = None
|
||||
if _force_method != "custom":
|
||||
out = method_matplotlib(image, cmap, bytes)
|
||||
|
||||
if _force_method == "matplotlib" and out is None:
|
||||
raise ImportError("Make sure to install matplotlib if you want to use a color map other than 'Spectral'.")
|
||||
|
||||
if out is None:
|
||||
out = method_custom(image, cmap, bytes)
|
||||
|
||||
return out
|
||||
|
||||
@staticmethod
|
||||
def visualize_depth(
|
||||
depth: Union[
|
||||
PIL.Image.Image,
|
||||
np.ndarray,
|
||||
torch.Tensor,
|
||||
List[PIL.Image.Image],
|
||||
List[np.ndarray],
|
||||
List[torch.Tensor],
|
||||
],
|
||||
val_min: float = 0.0,
|
||||
val_max: float = 1.0,
|
||||
color_map: str = "Spectral",
|
||||
) -> Union[PIL.Image.Image, List[PIL.Image.Image]]:
|
||||
"""
|
||||
Visualizes depth maps, such as predictions of the `MarigoldDepthPipeline`.
|
||||
|
||||
Args:
|
||||
depth (`Union[PIL.Image.Image, np.ndarray, torch.Tensor, List[PIL.Image.Image], List[np.ndarray],
|
||||
List[torch.Tensor]]`): Depth maps.
|
||||
val_min (`float`, *optional*, defaults to `0.0`): Minimum value of the visualized depth range.
|
||||
val_max (`float`, *optional*, defaults to `1.0`): Maximum value of the visualized depth range.
|
||||
color_map (`str`, *optional*, defaults to `"Spectral"`): Color map used to convert a single-channel
|
||||
depth prediction into colored representation.
|
||||
|
||||
Returns: `PIL.Image.Image` or `List[PIL.Image.Image]` with depth maps visualization.
|
||||
"""
|
||||
if val_max <= val_min:
|
||||
raise ValueError(f"Invalid values range: [{val_min}, {val_max}].")
|
||||
|
||||
def visualize_depth_one(img, idx=None):
|
||||
prefix = "Depth" + (f"[{idx}]" if idx else "")
|
||||
if isinstance(img, PIL.Image.Image):
|
||||
if img.mode != "I;16":
|
||||
raise ValueError(f"{prefix}: invalid PIL mode={img.mode}.")
|
||||
img = np.array(img).astype(np.float32) / (2**16 - 1)
|
||||
if isinstance(img, np.ndarray) or torch.is_tensor(img):
|
||||
if img.ndim != 2:
|
||||
raise ValueError(f"{prefix}: unexpected shape={img.shape}.")
|
||||
if isinstance(img, np.ndarray):
|
||||
img = torch.from_numpy(img)
|
||||
if not torch.is_floating_point(img):
|
||||
raise ValueError(f"{prefix}: unexected dtype={img.dtype}.")
|
||||
else:
|
||||
raise ValueError(f"{prefix}: unexpected type={type(img)}.")
|
||||
if val_min != 0.0 or val_max != 1.0:
|
||||
img = (img - val_min) / (val_max - val_min)
|
||||
img = MarigoldImageProcessor.colormap(img, cmap=color_map, bytes=True) # [H,W,3]
|
||||
img = PIL.Image.fromarray(img.cpu().numpy())
|
||||
return img
|
||||
|
||||
if depth is None or isinstance(depth, list) and any(o is None for o in depth):
|
||||
raise ValueError("Input depth is `None`")
|
||||
if isinstance(depth, (np.ndarray, torch.Tensor)):
|
||||
depth = MarigoldImageProcessor.expand_tensor_or_array(depth)
|
||||
if isinstance(depth, np.ndarray):
|
||||
depth = MarigoldImageProcessor.numpy_to_pt(depth) # [N,H,W,1] -> [N,1,H,W]
|
||||
if not (depth.ndim == 4 and depth.shape[1] == 1): # [N,1,H,W]
|
||||
raise ValueError(f"Unexpected input shape={depth.shape}, expecting [N,1,H,W].")
|
||||
return [visualize_depth_one(img[0], idx) for idx, img in enumerate(depth)]
|
||||
elif isinstance(depth, list):
|
||||
return [visualize_depth_one(img, idx) for idx, img in enumerate(depth)]
|
||||
else:
|
||||
raise ValueError(f"Unexpected input type: {type(depth)}")
|
||||
|
||||
@staticmethod
|
||||
def export_depth_to_16bit_png(
|
||||
depth: Union[np.ndarray, torch.Tensor, List[np.ndarray], List[torch.Tensor]],
|
||||
val_min: float = 0.0,
|
||||
val_max: float = 1.0,
|
||||
) -> Union[PIL.Image.Image, List[PIL.Image.Image]]:
|
||||
def export_depth_to_16bit_png_one(img, idx=None):
|
||||
prefix = "Depth" + (f"[{idx}]" if idx else "")
|
||||
if not isinstance(img, np.ndarray) and not torch.is_tensor(img):
|
||||
raise ValueError(f"{prefix}: unexpected type={type(img)}.")
|
||||
if img.ndim != 2:
|
||||
raise ValueError(f"{prefix}: unexpected shape={img.shape}.")
|
||||
if torch.is_tensor(img):
|
||||
img = img.cpu().numpy()
|
||||
if not np.issubdtype(img.dtype, np.floating):
|
||||
raise ValueError(f"{prefix}: unexected dtype={img.dtype}.")
|
||||
if val_min != 0.0 or val_max != 1.0:
|
||||
img = (img - val_min) / (val_max - val_min)
|
||||
img = (img * (2**16 - 1)).astype(np.uint16)
|
||||
img = PIL.Image.fromarray(img, mode="I;16")
|
||||
return img
|
||||
|
||||
if depth is None or isinstance(depth, list) and any(o is None for o in depth):
|
||||
raise ValueError("Input depth is `None`")
|
||||
if isinstance(depth, (np.ndarray, torch.Tensor)):
|
||||
depth = MarigoldImageProcessor.expand_tensor_or_array(depth)
|
||||
if isinstance(depth, np.ndarray):
|
||||
depth = MarigoldImageProcessor.numpy_to_pt(depth) # [N,H,W,1] -> [N,1,H,W]
|
||||
if not (depth.ndim == 4 and depth.shape[1] == 1):
|
||||
raise ValueError(f"Unexpected input shape={depth.shape}, expecting [N,1,H,W].")
|
||||
return [export_depth_to_16bit_png_one(img[0], idx) for idx, img in enumerate(depth)]
|
||||
elif isinstance(depth, list):
|
||||
return [export_depth_to_16bit_png_one(img, idx) for idx, img in enumerate(depth)]
|
||||
else:
|
||||
raise ValueError(f"Unexpected input type: {type(depth)}")
|
||||
|
||||
@staticmethod
|
||||
def visualize_normals(
|
||||
normals: Union[
|
||||
np.ndarray,
|
||||
torch.Tensor,
|
||||
List[np.ndarray],
|
||||
List[torch.Tensor],
|
||||
],
|
||||
flip_x: bool = False,
|
||||
flip_y: bool = False,
|
||||
flip_z: bool = False,
|
||||
) -> Union[PIL.Image.Image, List[PIL.Image.Image]]:
|
||||
"""
|
||||
Visualizes surface normals, such as predictions of the `MarigoldNormalsPipeline`.
|
||||
|
||||
Args:
|
||||
normals (`Union[np.ndarray, torch.Tensor, List[np.ndarray], List[torch.Tensor]]`):
|
||||
Surface normals.
|
||||
flip_x (`bool`, *optional*, defaults to `False`): Flips the X axis of the normals frame of reference.
|
||||
Default direction is right.
|
||||
flip_y (`bool`, *optional*, defaults to `False`): Flips the Y axis of the normals frame of reference.
|
||||
Default direction is top.
|
||||
flip_z (`bool`, *optional*, defaults to `False`): Flips the Z axis of the normals frame of reference.
|
||||
Default direction is facing the observer.
|
||||
|
||||
Returns: `PIL.Image.Image` or `List[PIL.Image.Image]` with surface normals visualization.
|
||||
"""
|
||||
flip_vec = None
|
||||
if any((flip_x, flip_y, flip_z)):
|
||||
flip_vec = torch.tensor(
|
||||
[
|
||||
(-1) ** flip_x,
|
||||
(-1) ** flip_y,
|
||||
(-1) ** flip_z,
|
||||
],
|
||||
dtype=torch.float32,
|
||||
)
|
||||
|
||||
def visualize_normals_one(img, idx=None):
|
||||
img = img.permute(1, 2, 0)
|
||||
if flip_vec is not None:
|
||||
img *= flip_vec.to(img.device)
|
||||
img = (img + 1.0) * 0.5
|
||||
img = (img * 255).to(dtype=torch.uint8, device="cpu").numpy()
|
||||
img = PIL.Image.fromarray(img)
|
||||
return img
|
||||
|
||||
if normals is None or isinstance(normals, list) and any(o is None for o in normals):
|
||||
raise ValueError("Input normals is `None`")
|
||||
if isinstance(normals, (np.ndarray, torch.Tensor)):
|
||||
normals = MarigoldImageProcessor.expand_tensor_or_array(normals)
|
||||
if isinstance(normals, np.ndarray):
|
||||
normals = MarigoldImageProcessor.numpy_to_pt(normals) # [N,3,H,W]
|
||||
if not (normals.ndim == 4 and normals.shape[1] == 3):
|
||||
raise ValueError(f"Unexpected input shape={normals.shape}, expecting [N,3,H,W].")
|
||||
return [visualize_normals_one(img, idx) for idx, img in enumerate(normals)]
|
||||
elif isinstance(normals, list):
|
||||
return [visualize_normals_one(img, idx) for idx, img in enumerate(normals)]
|
||||
else:
|
||||
raise ValueError(f"Unexpected input type: {type(normals)}")
|
||||
|
||||
@staticmethod
|
||||
def visualize_uncertainty(
|
||||
uncertainty: Union[
|
||||
np.ndarray,
|
||||
torch.Tensor,
|
||||
List[np.ndarray],
|
||||
List[torch.Tensor],
|
||||
],
|
||||
saturation_percentile=95,
|
||||
) -> Union[PIL.Image.Image, List[PIL.Image.Image]]:
|
||||
"""
|
||||
Visualizes dense uncertainties, such as produced by `MarigoldDepthPipeline` or `MarigoldNormalsPipeline`.
|
||||
|
||||
Args:
|
||||
uncertainty (`Union[np.ndarray, torch.Tensor, List[np.ndarray], List[torch.Tensor]]`):
|
||||
Uncertainty maps.
|
||||
saturation_percentile (`int`, *optional*, defaults to `95`):
|
||||
Specifies the percentile uncertainty value visualized with maximum intensity.
|
||||
|
||||
Returns: `PIL.Image.Image` or `List[PIL.Image.Image]` with uncertainty visualization.
|
||||
"""
|
||||
|
||||
def visualize_uncertainty_one(img, idx=None):
|
||||
prefix = "Uncertainty" + (f"[{idx}]" if idx else "")
|
||||
if img.min() < 0:
|
||||
raise ValueError(f"{prefix}: unexected data range, min={img.min()}.")
|
||||
img = img.squeeze(0).cpu().numpy()
|
||||
saturation_value = np.percentile(img, saturation_percentile)
|
||||
img = np.clip(img * 255 / saturation_value, 0, 255)
|
||||
img = img.astype(np.uint8)
|
||||
img = PIL.Image.fromarray(img)
|
||||
return img
|
||||
|
||||
if uncertainty is None or isinstance(uncertainty, list) and any(o is None for o in uncertainty):
|
||||
raise ValueError("Input uncertainty is `None`")
|
||||
if isinstance(uncertainty, (np.ndarray, torch.Tensor)):
|
||||
uncertainty = MarigoldImageProcessor.expand_tensor_or_array(uncertainty)
|
||||
if isinstance(uncertainty, np.ndarray):
|
||||
uncertainty = MarigoldImageProcessor.numpy_to_pt(uncertainty) # [N,1,H,W]
|
||||
if not (uncertainty.ndim == 4 and uncertainty.shape[1] == 1):
|
||||
raise ValueError(f"Unexpected input shape={uncertainty.shape}, expecting [N,1,H,W].")
|
||||
return [visualize_uncertainty_one(img, idx) for idx, img in enumerate(uncertainty)]
|
||||
elif isinstance(uncertainty, list):
|
||||
return [visualize_uncertainty_one(img, idx) for idx, img in enumerate(uncertainty)]
|
||||
else:
|
||||
raise ValueError(f"Unexpected input type: {type(uncertainty)}")
|
||||
@@ -0,0 +1,813 @@
|
||||
# Copyright 2024 Marigold authors, PRS ETH Zurich. All rights reserved.
|
||||
# Copyright 2024 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
# --------------------------------------------------------------------------
|
||||
# More information and citation instructions are available on the
|
||||
# Marigold project website: https://marigoldmonodepth.github.io
|
||||
# --------------------------------------------------------------------------
|
||||
from dataclasses import dataclass
|
||||
from functools import partial
|
||||
from typing import Any, Dict, List, Optional, Tuple, Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
from PIL import Image
|
||||
from tqdm.auto import tqdm
|
||||
from transformers import CLIPTextModel, CLIPTokenizer
|
||||
|
||||
from ...image_processor import PipelineImageInput
|
||||
from ...models import (
|
||||
AutoencoderKL,
|
||||
UNet2DConditionModel,
|
||||
)
|
||||
from ...schedulers import (
|
||||
DDIMScheduler,
|
||||
LCMScheduler,
|
||||
)
|
||||
from ...utils import (
|
||||
BaseOutput,
|
||||
logging,
|
||||
replace_example_docstring,
|
||||
)
|
||||
from ...utils.import_utils import is_scipy_available
|
||||
from ...utils.torch_utils import randn_tensor
|
||||
from ..pipeline_utils import DiffusionPipeline
|
||||
from .marigold_image_processing import MarigoldImageProcessor
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
||||
|
||||
EXAMPLE_DOC_STRING = """
|
||||
Examples:
|
||||
```py
|
||||
>>> import diffusers
|
||||
>>> import torch
|
||||
|
||||
>>> pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
|
||||
... "prs-eth/marigold-depth-lcm-v1-0", variant="fp16", torch_dtype=torch.float16
|
||||
... ).to("cuda")
|
||||
|
||||
>>> image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
>>> depth = pipe(image)
|
||||
|
||||
>>> vis = pipe.image_processor.visualize_depth(depth.prediction)
|
||||
>>> vis[0].save("einstein_depth.png")
|
||||
|
||||
>>> depth_16bit = pipe.image_processor.export_depth_to_16bit_png(depth.prediction)
|
||||
>>> depth_16bit[0].save("einstein_depth_16bit.png")
|
||||
```
|
||||
"""
|
||||
|
||||
|
||||
@dataclass
|
||||
class MarigoldDepthOutput(BaseOutput):
|
||||
"""
|
||||
Output class for Marigold monocular depth prediction pipeline.
|
||||
|
||||
Args:
|
||||
prediction (`np.ndarray`, `torch.Tensor`):
|
||||
Predicted depth maps with values in the range [0, 1]. The shape is always $numimages \times 1 \times height
|
||||
\times width$, regardless of whether the images were passed as a 4D array or a list.
|
||||
uncertainty (`None`, `np.ndarray`, `torch.Tensor`):
|
||||
Uncertainty maps computed from the ensemble, with values in the range [0, 1]. The shape is $numimages
|
||||
\times 1 \times height \times width$.
|
||||
latent (`None`, `torch.Tensor`):
|
||||
Latent features corresponding to the predictions, compatible with the `latents` argument of the pipeline.
|
||||
The shape is $numimages * numensemble \times 4 \times latentheight \times latentwidth$.
|
||||
"""
|
||||
|
||||
prediction: Union[np.ndarray, torch.Tensor]
|
||||
uncertainty: Union[None, np.ndarray, torch.Tensor]
|
||||
latent: Union[None, torch.Tensor]
|
||||
|
||||
|
||||
class MarigoldDepthPipeline(DiffusionPipeline):
|
||||
"""
|
||||
Pipeline for monocular depth estimation using the Marigold method: https://marigoldmonodepth.github.io.
|
||||
|
||||
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
|
||||
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
|
||||
|
||||
Args:
|
||||
unet (`UNet2DConditionModel`):
|
||||
Conditional U-Net to denoise the depth latent, conditioned on image latent.
|
||||
vae (`AutoencoderKL`):
|
||||
Variational Auto-Encoder (VAE) Model to encode and decode images and predictions to and from latent
|
||||
representations.
|
||||
scheduler (`DDIMScheduler` or `LCMScheduler`):
|
||||
A scheduler to be used in combination with `unet` to denoise the encoded image latents.
|
||||
text_encoder (`CLIPTextModel`):
|
||||
Text-encoder, for empty text embedding.
|
||||
tokenizer (`CLIPTokenizer`):
|
||||
CLIP tokenizer.
|
||||
prediction_type (`str`, *optional*):
|
||||
Type of predictions made by the model.
|
||||
scale_invariant (`bool`, *optional*):
|
||||
A model property specifying whether the predicted depth maps are scale-invariant. This value must be set in
|
||||
the model config. When used together with the `shift_invariant=True` flag, the model is also called
|
||||
"affine-invariant". NB: overriding this value is not supported.
|
||||
shift_invariant (`bool`, *optional*):
|
||||
A model property specifying whether the predicted depth maps are shift-invariant. This value must be set in
|
||||
the model config. When used together with the `scale_invariant=True` flag, the model is also called
|
||||
"affine-invariant". NB: overriding this value is not supported.
|
||||
default_denoising_steps (`int`, *optional*):
|
||||
The minimum number of denoising diffusion steps that are required to produce a prediction of reasonable
|
||||
quality with the given model. This value must be set in the model config. When the pipeline is called
|
||||
without explicitly setting `num_inference_steps`, the default value is used. This is required to ensure
|
||||
reasonable results with various model flavors compatible with the pipeline, such as those relying on very
|
||||
short denoising schedules (`LCMScheduler`) and those with full diffusion schedules (`DDIMScheduler`).
|
||||
default_processing_resolution (`int`, *optional*):
|
||||
The recommended value of the `processing_resolution` parameter of the pipeline. This value must be set in
|
||||
the model config. When the pipeline is called without explicitly setting `processing_resolution`, the
|
||||
default value is used. This is required to ensure reasonable results with various model flavors trained
|
||||
with varying optimal processing resolution values.
|
||||
"""
|
||||
|
||||
model_cpu_offload_seq = "text_encoder->unet->vae"
|
||||
supported_prediction_types = ("depth", "disparity")
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
unet: UNet2DConditionModel,
|
||||
vae: AutoencoderKL,
|
||||
scheduler: Union[DDIMScheduler, LCMScheduler],
|
||||
text_encoder: CLIPTextModel,
|
||||
tokenizer: CLIPTokenizer,
|
||||
prediction_type: Optional[str] = None,
|
||||
scale_invariant: Optional[bool] = True,
|
||||
shift_invariant: Optional[bool] = True,
|
||||
default_denoising_steps: Optional[int] = None,
|
||||
default_processing_resolution: Optional[int] = None,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
if prediction_type not in self.supported_prediction_types:
|
||||
logger.warning(
|
||||
f"Potentially unsupported `prediction_type='{prediction_type}'`; values supported by the pipeline: "
|
||||
f"{self.supported_prediction_types}."
|
||||
)
|
||||
|
||||
self.register_modules(
|
||||
unet=unet,
|
||||
vae=vae,
|
||||
scheduler=scheduler,
|
||||
text_encoder=text_encoder,
|
||||
tokenizer=tokenizer,
|
||||
)
|
||||
self.register_to_config(
|
||||
prediction_type=prediction_type,
|
||||
scale_invariant=scale_invariant,
|
||||
shift_invariant=shift_invariant,
|
||||
default_denoising_steps=default_denoising_steps,
|
||||
default_processing_resolution=default_processing_resolution,
|
||||
)
|
||||
|
||||
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
|
||||
|
||||
self.scale_invariant = scale_invariant
|
||||
self.shift_invariant = shift_invariant
|
||||
self.default_denoising_steps = default_denoising_steps
|
||||
self.default_processing_resolution = default_processing_resolution
|
||||
|
||||
self.empty_text_embedding = None
|
||||
|
||||
self.image_processor = MarigoldImageProcessor(vae_scale_factor=self.vae_scale_factor)
|
||||
|
||||
def check_inputs(
|
||||
self,
|
||||
image: PipelineImageInput,
|
||||
num_inference_steps: int,
|
||||
ensemble_size: int,
|
||||
processing_resolution: int,
|
||||
resample_method_input: str,
|
||||
resample_method_output: str,
|
||||
batch_size: int,
|
||||
ensembling_kwargs: Optional[Dict[str, Any]],
|
||||
latents: Optional[torch.Tensor],
|
||||
generator: Optional[Union[torch.Generator, List[torch.Generator]]],
|
||||
output_type: str,
|
||||
output_uncertainty: bool,
|
||||
) -> int:
|
||||
if num_inference_steps is None:
|
||||
raise ValueError("`num_inference_steps` is not specified and could not be resolved from the model config.")
|
||||
if num_inference_steps < 1:
|
||||
raise ValueError("`num_inference_steps` must be positive.")
|
||||
if ensemble_size < 1:
|
||||
raise ValueError("`ensemble_size` must be positive.")
|
||||
if ensemble_size == 2:
|
||||
logger.warning(
|
||||
"`ensemble_size` == 2 results are similar to no ensembling (1); "
|
||||
"consider increasing the value to at least 3."
|
||||
)
|
||||
if ensemble_size > 1 and (self.scale_invariant or self.shift_invariant) and not is_scipy_available():
|
||||
raise ImportError("Make sure to install scipy if you want to use ensembling.")
|
||||
if ensemble_size == 1 and output_uncertainty:
|
||||
raise ValueError(
|
||||
"Computing uncertainty by setting `output_uncertainty=True` also requires setting `ensemble_size` "
|
||||
"greater than 1."
|
||||
)
|
||||
if processing_resolution is None:
|
||||
raise ValueError(
|
||||
"`processing_resolution` is not specified and could not be resolved from the model config."
|
||||
)
|
||||
if processing_resolution < 0:
|
||||
raise ValueError(
|
||||
"`processing_resolution` must be non-negative: 0 for native resolution, or any positive value for "
|
||||
"downsampled processing."
|
||||
)
|
||||
if processing_resolution % self.vae_scale_factor != 0:
|
||||
raise ValueError(f"`processing_resolution` must be a multiple of {self.vae_scale_factor}.")
|
||||
if resample_method_input not in ("nearest", "nearest-exact", "bilinear", "bicubic", "area"):
|
||||
raise ValueError(
|
||||
"`resample_method_input` takes string values compatible with PIL library: "
|
||||
"nearest, nearest-exact, bilinear, bicubic, area."
|
||||
)
|
||||
if resample_method_output not in ("nearest", "nearest-exact", "bilinear", "bicubic", "area"):
|
||||
raise ValueError(
|
||||
"`resample_method_output` takes string values compatible with PIL library: "
|
||||
"nearest, nearest-exact, bilinear, bicubic, area."
|
||||
)
|
||||
if batch_size < 1:
|
||||
raise ValueError("`batch_size` must be positive.")
|
||||
if output_type not in ["pt", "np"]:
|
||||
raise ValueError("`output_type` must be one of `pt` or `np`.")
|
||||
if latents is not None and generator is not None:
|
||||
raise ValueError("`latents` and `generator` cannot be used together.")
|
||||
if ensembling_kwargs is not None:
|
||||
if not isinstance(ensembling_kwargs, dict):
|
||||
raise ValueError("`ensembling_kwargs` must be a dictionary.")
|
||||
if "reduction" in ensembling_kwargs and ensembling_kwargs["reduction"] not in ("mean", "median"):
|
||||
raise ValueError("`ensembling_kwargs['reduction']` can be either `'mean'` or `'median'`.")
|
||||
|
||||
# image checks
|
||||
num_images = 0
|
||||
W, H = None, None
|
||||
if not isinstance(image, list):
|
||||
image = [image]
|
||||
for i, img in enumerate(image):
|
||||
if isinstance(img, np.ndarray) or torch.is_tensor(img):
|
||||
if img.ndim not in (2, 3, 4):
|
||||
raise ValueError(f"`image[{i}]` has unsupported dimensions or shape: {img.shape}.")
|
||||
H_i, W_i = img.shape[-2:]
|
||||
N_i = 1
|
||||
if img.ndim == 4:
|
||||
N_i = img.shape[0]
|
||||
elif isinstance(img, Image.Image):
|
||||
W_i, H_i = img.size
|
||||
N_i = 1
|
||||
else:
|
||||
raise ValueError(f"Unsupported `image[{i}]` type: {type(img)}.")
|
||||
if W is None:
|
||||
W, H = W_i, H_i
|
||||
elif (W, H) != (W_i, H_i):
|
||||
raise ValueError(
|
||||
f"Input `image[{i}]` has incompatible dimensions {(W_i, H_i)} with the previous images {(W, H)}"
|
||||
)
|
||||
num_images += N_i
|
||||
|
||||
# latents checks
|
||||
if latents is not None:
|
||||
if not torch.is_tensor(latents):
|
||||
raise ValueError("`latents` must be a torch.Tensor.")
|
||||
if latents.dim() != 4:
|
||||
raise ValueError(f"`latents` has unsupported dimensions or shape: {latents.shape}.")
|
||||
|
||||
if processing_resolution > 0:
|
||||
max_orig = max(H, W)
|
||||
new_H = H * processing_resolution // max_orig
|
||||
new_W = W * processing_resolution // max_orig
|
||||
if new_H == 0 or new_W == 0:
|
||||
raise ValueError(f"Extreme aspect ratio of the input image: [{W} x {H}]")
|
||||
W, H = new_W, new_H
|
||||
w = (W + self.vae_scale_factor - 1) // self.vae_scale_factor
|
||||
h = (H + self.vae_scale_factor - 1) // self.vae_scale_factor
|
||||
shape_expected = (num_images * ensemble_size, self.vae.config.latent_channels, h, w)
|
||||
|
||||
if latents.shape != shape_expected:
|
||||
raise ValueError(f"`latents` has unexpected shape={latents.shape} expected={shape_expected}.")
|
||||
|
||||
# generator checks
|
||||
if generator is not None:
|
||||
if isinstance(generator, list):
|
||||
if len(generator) != num_images * ensemble_size:
|
||||
raise ValueError(
|
||||
"The number of generators must match the total number of ensemble members for all input images."
|
||||
)
|
||||
if not all(g.device.type == generator[0].device.type for g in generator):
|
||||
raise ValueError("`generator` device placement is not consistent in the list.")
|
||||
elif not isinstance(generator, torch.Generator):
|
||||
raise ValueError(f"Unsupported generator type: {type(generator)}.")
|
||||
|
||||
return num_images
|
||||
|
||||
def progress_bar(self, iterable=None, total=None, desc=None, leave=True):
|
||||
if not hasattr(self, "_progress_bar_config"):
|
||||
self._progress_bar_config = {}
|
||||
elif not isinstance(self._progress_bar_config, dict):
|
||||
raise ValueError(
|
||||
f"`self._progress_bar_config` should be of type `dict`, but is {type(self._progress_bar_config)}."
|
||||
)
|
||||
|
||||
progress_bar_config = dict(**self._progress_bar_config)
|
||||
progress_bar_config["desc"] = progress_bar_config.get("desc", desc)
|
||||
progress_bar_config["leave"] = progress_bar_config.get("leave", leave)
|
||||
if iterable is not None:
|
||||
return tqdm(iterable, **progress_bar_config)
|
||||
elif total is not None:
|
||||
return tqdm(total=total, **progress_bar_config)
|
||||
else:
|
||||
raise ValueError("Either `total` or `iterable` has to be defined.")
|
||||
|
||||
@torch.no_grad()
|
||||
@replace_example_docstring(EXAMPLE_DOC_STRING)
|
||||
def __call__(
|
||||
self,
|
||||
image: PipelineImageInput,
|
||||
num_inference_steps: Optional[int] = None,
|
||||
ensemble_size: int = 1,
|
||||
processing_resolution: Optional[int] = None,
|
||||
match_input_resolution: bool = True,
|
||||
resample_method_input: str = "bilinear",
|
||||
resample_method_output: str = "bilinear",
|
||||
batch_size: int = 1,
|
||||
ensembling_kwargs: Optional[Dict[str, Any]] = None,
|
||||
latents: Optional[Union[torch.Tensor, List[torch.Tensor]]] = None,
|
||||
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
|
||||
output_type: str = "np",
|
||||
output_uncertainty: bool = False,
|
||||
output_latent: bool = False,
|
||||
return_dict: bool = True,
|
||||
):
|
||||
"""
|
||||
Function invoked when calling the pipeline.
|
||||
|
||||
Args:
|
||||
image (`PIL.Image.Image`, `np.ndarray`, `torch.Tensor`, `List[PIL.Image.Image]`, `List[np.ndarray]`),
|
||||
`List[torch.Tensor]`: An input image or images used as an input for the depth estimation task. For
|
||||
arrays and tensors, the expected value range is between `[0, 1]`. Passing a batch of images is possible
|
||||
by providing a four-dimensional array or a tensor. Additionally, a list of images of two- or
|
||||
three-dimensional arrays or tensors can be passed. In the latter case, all list elements must have the
|
||||
same width and height.
|
||||
num_inference_steps (`int`, *optional*, defaults to `None`):
|
||||
Number of denoising diffusion steps during inference. The default value `None` results in automatic
|
||||
selection. The number of steps should be at least 10 with the full Marigold models, and between 1 and 4
|
||||
for Marigold-LCM models.
|
||||
ensemble_size (`int`, defaults to `1`):
|
||||
Number of ensemble predictions. Recommended values are 5 and higher for better precision, or 1 for
|
||||
faster inference.
|
||||
processing_resolution (`int`, *optional*, defaults to `None`):
|
||||
Effective processing resolution. When set to `0`, matches the larger input image dimension. This
|
||||
produces crisper predictions, but may also lead to the overall loss of global context. The default
|
||||
value `None` resolves to the optimal value from the model config.
|
||||
match_input_resolution (`bool`, *optional*, defaults to `True`):
|
||||
When enabled, the output prediction is resized to match the input dimensions. When disabled, the longer
|
||||
side of the output will equal to `processing_resolution`.
|
||||
resample_method_input (`str`, *optional*, defaults to `"bilinear"`):
|
||||
Resampling method used to resize input images to `processing_resolution`. The accepted values are:
|
||||
`"nearest"`, `"nearest-exact"`, `"bilinear"`, `"bicubic"`, or `"area"`.
|
||||
resample_method_output (`str`, *optional*, defaults to `"bilinear"`):
|
||||
Resampling method used to resize output predictions to match the input resolution. The accepted values
|
||||
are `"nearest"`, `"nearest-exact"`, `"bilinear"`, `"bicubic"`, or `"area"`.
|
||||
batch_size (`int`, *optional*, defaults to `1`):
|
||||
Batch size; only matters when setting `ensemble_size` or passing a tensor of images.
|
||||
ensembling_kwargs (`dict`, *optional*, defaults to `None`)
|
||||
Extra dictionary with arguments for precise ensembling control. The following options are available:
|
||||
- reduction (`str`, *optional*, defaults to `"median"`): Defines the ensembling function applied in
|
||||
every pixel location, can be either `"median"` or `"mean"`.
|
||||
- regularizer_strength (`float`, *optional*, defaults to `0.02`): Strength of the regularizer that
|
||||
pulls the aligned predictions to the unit range from 0 to 1.
|
||||
- max_iter (`int`, *optional*, defaults to `2`): Maximum number of the alignment solver steps. Refer to
|
||||
`scipy.optimize.minimize` function, `options` argument.
|
||||
- tol (`float`, *optional*, defaults to `1e-3`): Alignment solver tolerance. The solver stops when the
|
||||
tolerance is reached.
|
||||
- max_res (`int`, *optional*, defaults to `None`): Resolution at which the alignment is performed;
|
||||
`None` matches the `processing_resolution`.
|
||||
latents (`torch.Tensor`, or `List[torch.Tensor]`, *optional*, defaults to `None`):
|
||||
Latent noise tensors to replace the random initialization. These can be taken from the previous
|
||||
function call's output.
|
||||
generator (`torch.Generator`, or `List[torch.Generator]`, *optional*, defaults to `None`):
|
||||
Random number generator object to ensure reproducibility.
|
||||
output_type (`str`, *optional*, defaults to `"np"`):
|
||||
Preferred format of the output's `prediction` and the optional `uncertainty` fields. The accepted
|
||||
values are: `"np"` (numpy array) or `"pt"` (torch tensor).
|
||||
output_uncertainty (`bool`, *optional*, defaults to `False`):
|
||||
When enabled, the output's `uncertainty` field contains the predictive uncertainty map, provided that
|
||||
the `ensemble_size` argument is set to a value above 2.
|
||||
output_latent (`bool`, *optional*, defaults to `False`):
|
||||
When enabled, the output's `latent` field contains the latent codes corresponding to the predictions
|
||||
within the ensemble. These codes can be saved, modified, and used for subsequent calls with the
|
||||
`latents` argument.
|
||||
return_dict (`bool`, *optional*, defaults to `True`):
|
||||
Whether or not to return a [`~pipelines.marigold.MarigoldDepthOutput`] instead of a plain tuple.
|
||||
|
||||
Examples:
|
||||
|
||||
Returns:
|
||||
[`~pipelines.marigold.MarigoldDepthOutput`] or `tuple`:
|
||||
If `return_dict` is `True`, [`~pipelines.marigold.MarigoldDepthOutput`] is returned, otherwise a
|
||||
`tuple` is returned where the first element is the prediction, the second element is the uncertainty
|
||||
(or `None`), and the third is the latent (or `None`).
|
||||
"""
|
||||
|
||||
# 0. Resolving variables.
|
||||
device = self._execution_device
|
||||
dtype = self.dtype
|
||||
|
||||
# Model-specific optimal default values leading to fast and reasonable results.
|
||||
if num_inference_steps is None:
|
||||
num_inference_steps = self.default_denoising_steps
|
||||
if processing_resolution is None:
|
||||
processing_resolution = self.default_processing_resolution
|
||||
|
||||
# 1. Check inputs.
|
||||
num_images = self.check_inputs(
|
||||
image,
|
||||
num_inference_steps,
|
||||
ensemble_size,
|
||||
processing_resolution,
|
||||
resample_method_input,
|
||||
resample_method_output,
|
||||
batch_size,
|
||||
ensembling_kwargs,
|
||||
latents,
|
||||
generator,
|
||||
output_type,
|
||||
output_uncertainty,
|
||||
)
|
||||
|
||||
# 2. Prepare empty text conditioning.
|
||||
# Model invocation: self.tokenizer, self.text_encoder.
|
||||
if self.empty_text_embedding is None:
|
||||
prompt = ""
|
||||
text_inputs = self.tokenizer(
|
||||
prompt,
|
||||
padding="do_not_pad",
|
||||
max_length=self.tokenizer.model_max_length,
|
||||
truncation=True,
|
||||
return_tensors="pt",
|
||||
)
|
||||
text_input_ids = text_inputs.input_ids.to(device)
|
||||
self.empty_text_embedding = self.text_encoder(text_input_ids)[0] # [1,2,1024]
|
||||
|
||||
# 3. Preprocess input images. This function loads input image or images of compatible dimensions `(H, W)`,
|
||||
# optionally downsamples them to the `processing_resolution` `(PH, PW)`, where
|
||||
# `max(PH, PW) == processing_resolution`, and pads the dimensions to `(PPH, PPW)` such that these values are
|
||||
# divisible by the latent space downscaling factor (typically 8 in Stable Diffusion). The default value `None`
|
||||
# of `processing_resolution` resolves to the optimal value from the model config. It is a recommended mode of
|
||||
# operation and leads to the most reasonable results. Using the native image resolution or any other processing
|
||||
# resolution can lead to loss of either fine details or global context in the output predictions.
|
||||
image, padding, original_resolution = self.image_processor.preprocess(
|
||||
image, processing_resolution, resample_method_input, device, dtype
|
||||
) # [N,3,PPH,PPW]
|
||||
|
||||
# 4. Encode input image into latent space. At this step, each of the `N` input images is represented with `E`
|
||||
# ensemble members. Each ensemble member is an independent diffused prediction, just initialized independently.
|
||||
# Latents of each such predictions across all input images and all ensemble members are represented in the
|
||||
# `pred_latent` variable. The variable `image_latent` is of the same shape: it contains each input image encoded
|
||||
# into latent space and replicated `E` times. The latents can be either generated (see `generator` to ensure
|
||||
# reproducibility), or passed explicitly via the `latents` argument. The latter can be set outside the pipeline
|
||||
# code. For example, in the Marigold-LCM video processing demo, the latents initialization of a frame is taken
|
||||
# as a convex combination of the latents output of the pipeline for the previous frame and a newly-sampled
|
||||
# noise. This behavior can be achieved by setting the `output_latent` argument to `True`. The latent space
|
||||
# dimensions are `(h, w)`. Encoding into latent space happens in batches of size `batch_size`.
|
||||
# Model invocation: self.vae.encoder.
|
||||
image_latent, pred_latent = self.prepare_latents(
|
||||
image, latents, generator, ensemble_size, batch_size
|
||||
) # [N*E,4,h,w], [N*E,4,h,w]
|
||||
|
||||
del image
|
||||
|
||||
batch_empty_text_embedding = self.empty_text_embedding.to(device=device, dtype=dtype).repeat(
|
||||
batch_size, 1, 1
|
||||
) # [B,1024,2]
|
||||
|
||||
# 5. Process the denoising loop. All `N * E` latents are processed sequentially in batches of size `batch_size`.
|
||||
# The unet model takes concatenated latent spaces of the input image and the predicted modality as an input, and
|
||||
# outputs noise for the predicted modality's latent space. The number of denoising diffusion steps is defined by
|
||||
# `num_inference_steps`. It is either set directly, or resolves to the optimal value specific to the loaded
|
||||
# model.
|
||||
# Model invocation: self.unet.
|
||||
pred_latents = []
|
||||
|
||||
for i in self.progress_bar(
|
||||
range(0, num_images * ensemble_size, batch_size), leave=True, desc="Marigold predictions..."
|
||||
):
|
||||
batch_image_latent = image_latent[i : i + batch_size] # [B,4,h,w]
|
||||
batch_pred_latent = pred_latent[i : i + batch_size] # [B,4,h,w]
|
||||
effective_batch_size = batch_image_latent.shape[0]
|
||||
text = batch_empty_text_embedding[:effective_batch_size] # [B,2,1024]
|
||||
|
||||
self.scheduler.set_timesteps(num_inference_steps, device=device)
|
||||
for t in self.progress_bar(self.scheduler.timesteps, leave=False, desc="Diffusion steps..."):
|
||||
batch_latent = torch.cat([batch_image_latent, batch_pred_latent], dim=1) # [B,8,h,w]
|
||||
noise = self.unet(batch_latent, t, encoder_hidden_states=text, return_dict=False)[0] # [B,4,h,w]
|
||||
batch_pred_latent = self.scheduler.step(
|
||||
noise, t, batch_pred_latent, generator=generator
|
||||
).prev_sample # [B,4,h,w]
|
||||
|
||||
pred_latents.append(batch_pred_latent)
|
||||
|
||||
pred_latent = torch.cat(pred_latents, dim=0) # [N*E,4,h,w]
|
||||
|
||||
del (
|
||||
pred_latents,
|
||||
image_latent,
|
||||
batch_empty_text_embedding,
|
||||
batch_image_latent,
|
||||
batch_pred_latent,
|
||||
text,
|
||||
batch_latent,
|
||||
noise,
|
||||
)
|
||||
|
||||
# 6. Decode predictions from latent into pixel space. The resulting `N * E` predictions have shape `(PPH, PPW)`,
|
||||
# which requires slight postprocessing. Decoding into pixel space happens in batches of size `batch_size`.
|
||||
# Model invocation: self.vae.decoder.
|
||||
prediction = torch.cat(
|
||||
[
|
||||
self.decode_prediction(pred_latent[i : i + batch_size])
|
||||
for i in range(0, pred_latent.shape[0], batch_size)
|
||||
],
|
||||
dim=0,
|
||||
) # [N*E,1,PPH,PPW]
|
||||
|
||||
if not output_latent:
|
||||
pred_latent = None
|
||||
|
||||
# 7. Remove padding. The output shape is (PH, PW).
|
||||
prediction = self.image_processor.unpad_image(prediction, padding) # [N*E,1,PH,PW]
|
||||
|
||||
# 8. Ensemble and compute uncertainty (when `output_uncertainty` is set). This code treats each of the `N`
|
||||
# groups of `E` ensemble predictions independently. For each group it computes an ensembled prediction of shape
|
||||
# `(PH, PW)` and an optional uncertainty map of the same dimensions. After computing this pair of outputs for
|
||||
# each group independently, it stacks them respectively into batches of `N` almost final predictions and
|
||||
# uncertainty maps.
|
||||
uncertainty = None
|
||||
if ensemble_size > 1:
|
||||
prediction = prediction.reshape(num_images, ensemble_size, *prediction.shape[1:]) # [N,E,1,PH,PW]
|
||||
prediction = [
|
||||
self.ensemble_depth(
|
||||
prediction[i],
|
||||
self.scale_invariant,
|
||||
self.shift_invariant,
|
||||
output_uncertainty,
|
||||
**(ensembling_kwargs or {}),
|
||||
)
|
||||
for i in range(num_images)
|
||||
] # [ [[1,1,PH,PW], [1,1,PH,PW]], ... ]
|
||||
prediction, uncertainty = zip(*prediction) # [[1,1,PH,PW], ... ], [[1,1,PH,PW], ... ]
|
||||
prediction = torch.cat(prediction, dim=0) # [N,1,PH,PW]
|
||||
if output_uncertainty:
|
||||
uncertainty = torch.cat(uncertainty, dim=0) # [N,1,PH,PW]
|
||||
else:
|
||||
uncertainty = None
|
||||
|
||||
# 9. If `match_input_resolution` is set, the output prediction and the uncertainty are upsampled to match the
|
||||
# input resolution `(H, W)`. This step may introduce upsampling artifacts, and therefore can be disabled.
|
||||
# Depending on the downstream use-case, upsampling can be also chosen based on the tolerated artifacts by
|
||||
# setting the `resample_method_output` parameter (e.g., to `"nearest"`).
|
||||
if match_input_resolution:
|
||||
prediction = self.image_processor.resize_antialias(
|
||||
prediction, original_resolution, resample_method_output, is_aa=False
|
||||
) # [N,1,H,W]
|
||||
if uncertainty is not None and output_uncertainty:
|
||||
uncertainty = self.image_processor.resize_antialias(
|
||||
uncertainty, original_resolution, resample_method_output, is_aa=False
|
||||
) # [N,1,H,W]
|
||||
|
||||
# 10. Prepare the final outputs.
|
||||
if output_type == "np":
|
||||
prediction = self.image_processor.pt_to_numpy(prediction) # [N,H,W,1]
|
||||
if uncertainty is not None and output_uncertainty:
|
||||
uncertainty = self.image_processor.pt_to_numpy(uncertainty) # [N,H,W,1]
|
||||
|
||||
# 11. Offload all models
|
||||
self.maybe_free_model_hooks()
|
||||
|
||||
if not return_dict:
|
||||
return (prediction, uncertainty, pred_latent)
|
||||
|
||||
return MarigoldDepthOutput(
|
||||
prediction=prediction,
|
||||
uncertainty=uncertainty,
|
||||
latent=pred_latent,
|
||||
)
|
||||
|
||||
def prepare_latents(
|
||||
self,
|
||||
image: torch.Tensor,
|
||||
latents: Optional[torch.Tensor],
|
||||
generator: Optional[torch.Generator],
|
||||
ensemble_size: int,
|
||||
batch_size: int,
|
||||
) -> Tuple[torch.Tensor, torch.Tensor]:
|
||||
def retrieve_latents(encoder_output):
|
||||
if hasattr(encoder_output, "latent_dist"):
|
||||
return encoder_output.latent_dist.mode()
|
||||
elif hasattr(encoder_output, "latents"):
|
||||
return encoder_output.latents
|
||||
else:
|
||||
raise AttributeError("Could not access latents of provided encoder_output")
|
||||
|
||||
image_latent = torch.cat(
|
||||
[
|
||||
retrieve_latents(self.vae.encode(image[i : i + batch_size]))
|
||||
for i in range(0, image.shape[0], batch_size)
|
||||
],
|
||||
dim=0,
|
||||
) # [N,4,h,w]
|
||||
image_latent = image_latent * self.vae.config.scaling_factor
|
||||
image_latent = image_latent.repeat_interleave(ensemble_size, dim=0) # [N*E,4,h,w]
|
||||
|
||||
pred_latent = latents
|
||||
if pred_latent is None:
|
||||
pred_latent = randn_tensor(
|
||||
image_latent.shape,
|
||||
generator=generator,
|
||||
device=image_latent.device,
|
||||
dtype=image_latent.dtype,
|
||||
) # [N*E,4,h,w]
|
||||
|
||||
return image_latent, pred_latent
|
||||
|
||||
def decode_prediction(self, pred_latent: torch.Tensor) -> torch.Tensor:
|
||||
if pred_latent.dim() != 4 or pred_latent.shape[1] != self.vae.config.latent_channels:
|
||||
raise ValueError(
|
||||
f"Expecting 4D tensor of shape [B,{self.vae.config.latent_channels},H,W]; got {pred_latent.shape}."
|
||||
)
|
||||
|
||||
prediction = self.vae.decode(pred_latent / self.vae.config.scaling_factor, return_dict=False)[0] # [B,3,H,W]
|
||||
|
||||
prediction = prediction.mean(dim=1, keepdim=True) # [B,1,H,W]
|
||||
prediction = torch.clip(prediction, -1.0, 1.0) # [B,1,H,W]
|
||||
prediction = (prediction + 1.0) / 2.0
|
||||
|
||||
return prediction # [B,1,H,W]
|
||||
|
||||
@staticmethod
|
||||
def ensemble_depth(
|
||||
depth: torch.Tensor,
|
||||
scale_invariant: bool = True,
|
||||
shift_invariant: bool = True,
|
||||
output_uncertainty: bool = False,
|
||||
reduction: str = "median",
|
||||
regularizer_strength: float = 0.02,
|
||||
max_iter: int = 2,
|
||||
tol: float = 1e-3,
|
||||
max_res: int = 1024,
|
||||
) -> Tuple[torch.Tensor, Optional[torch.Tensor]]:
|
||||
"""
|
||||
Ensembles the depth maps represented by the `depth` tensor with expected shape `(B, 1, H, W)`, where B is the
|
||||
number of ensemble members for a given prediction of size `(H x W)`. Even though the function is designed for
|
||||
depth maps, it can also be used with disparity maps as long as the input tensor values are non-negative. The
|
||||
alignment happens when the predictions have one or more degrees of freedom, that is when they are either
|
||||
affine-invariant (`scale_invariant=True` and `shift_invariant=True`), or just scale-invariant (only
|
||||
`scale_invariant=True`). For absolute predictions (`scale_invariant=False` and `shift_invariant=False`)
|
||||
alignment is skipped and only ensembling is performed.
|
||||
|
||||
Args:
|
||||
depth (`torch.Tensor`):
|
||||
Input ensemble depth maps.
|
||||
scale_invariant (`bool`, *optional*, defaults to `True`):
|
||||
Whether to treat predictions as scale-invariant.
|
||||
shift_invariant (`bool`, *optional*, defaults to `True`):
|
||||
Whether to treat predictions as shift-invariant.
|
||||
output_uncertainty (`bool`, *optional*, defaults to `False`):
|
||||
Whether to output uncertainty map.
|
||||
reduction (`str`, *optional*, defaults to `"median"`):
|
||||
Reduction method used to ensemble aligned predictions. The accepted values are: `"mean"` and
|
||||
`"median"`.
|
||||
regularizer_strength (`float`, *optional*, defaults to `0.02`):
|
||||
Strength of the regularizer that pulls the aligned predictions to the unit range from 0 to 1.
|
||||
max_iter (`int`, *optional*, defaults to `2`):
|
||||
Maximum number of the alignment solver steps. Refer to `scipy.optimize.minimize` function, `options`
|
||||
argument.
|
||||
tol (`float`, *optional*, defaults to `1e-3`):
|
||||
Alignment solver tolerance. The solver stops when the tolerance is reached.
|
||||
max_res (`int`, *optional*, defaults to `1024`):
|
||||
Resolution at which the alignment is performed; `None` matches the `processing_resolution`.
|
||||
Returns:
|
||||
A tensor of aligned and ensembled depth maps and optionally a tensor of uncertainties of the same shape:
|
||||
`(1, 1, H, W)`.
|
||||
"""
|
||||
if depth.dim() != 4 or depth.shape[1] != 1:
|
||||
raise ValueError(f"Expecting 4D tensor of shape [B,1,H,W]; got {depth.shape}.")
|
||||
if reduction not in ("mean", "median"):
|
||||
raise ValueError(f"Unrecognized reduction method: {reduction}.")
|
||||
if not scale_invariant and shift_invariant:
|
||||
raise ValueError("Pure shift-invariant ensembling is not supported.")
|
||||
|
||||
def init_param(depth: torch.Tensor):
|
||||
init_min = depth.reshape(ensemble_size, -1).min(dim=1).values
|
||||
init_max = depth.reshape(ensemble_size, -1).max(dim=1).values
|
||||
|
||||
if scale_invariant and shift_invariant:
|
||||
init_s = 1.0 / (init_max - init_min).clamp(min=1e-6)
|
||||
init_t = -init_s * init_min
|
||||
param = torch.cat((init_s, init_t)).cpu().numpy()
|
||||
elif scale_invariant:
|
||||
init_s = 1.0 / init_max.clamp(min=1e-6)
|
||||
param = init_s.cpu().numpy()
|
||||
else:
|
||||
raise ValueError("Unrecognized alignment.")
|
||||
|
||||
return param
|
||||
|
||||
def align(depth: torch.Tensor, param: np.ndarray) -> torch.Tensor:
|
||||
if scale_invariant and shift_invariant:
|
||||
s, t = np.split(param, 2)
|
||||
s = torch.from_numpy(s).to(depth).view(ensemble_size, 1, 1, 1)
|
||||
t = torch.from_numpy(t).to(depth).view(ensemble_size, 1, 1, 1)
|
||||
out = depth * s + t
|
||||
elif scale_invariant:
|
||||
s = torch.from_numpy(param).to(depth).view(ensemble_size, 1, 1, 1)
|
||||
out = depth * s
|
||||
else:
|
||||
raise ValueError("Unrecognized alignment.")
|
||||
return out
|
||||
|
||||
def ensemble(
|
||||
depth_aligned: torch.Tensor, return_uncertainty: bool = False
|
||||
) -> Tuple[torch.Tensor, Optional[torch.Tensor]]:
|
||||
uncertainty = None
|
||||
if reduction == "mean":
|
||||
prediction = torch.mean(depth_aligned, dim=0, keepdim=True)
|
||||
if return_uncertainty:
|
||||
uncertainty = torch.std(depth_aligned, dim=0, keepdim=True)
|
||||
elif reduction == "median":
|
||||
prediction = torch.median(depth_aligned, dim=0, keepdim=True).values
|
||||
if return_uncertainty:
|
||||
uncertainty = torch.median(torch.abs(depth_aligned - prediction), dim=0, keepdim=True).values
|
||||
else:
|
||||
raise ValueError(f"Unrecognized reduction method: {reduction}.")
|
||||
return prediction, uncertainty
|
||||
|
||||
def cost_fn(param: np.ndarray, depth: torch.Tensor) -> float:
|
||||
cost = 0.0
|
||||
depth_aligned = align(depth, param)
|
||||
|
||||
for i, j in torch.combinations(torch.arange(ensemble_size)):
|
||||
diff = depth_aligned[i] - depth_aligned[j]
|
||||
cost += (diff**2).mean().sqrt().item()
|
||||
|
||||
if regularizer_strength > 0:
|
||||
prediction, _ = ensemble(depth_aligned, return_uncertainty=False)
|
||||
err_near = (0.0 - prediction.min()).abs().item()
|
||||
err_far = (1.0 - prediction.max()).abs().item()
|
||||
cost += (err_near + err_far) * regularizer_strength
|
||||
|
||||
return cost
|
||||
|
||||
def compute_param(depth: torch.Tensor):
|
||||
import scipy
|
||||
|
||||
depth_to_align = depth.to(torch.float32)
|
||||
if max_res is not None and max(depth_to_align.shape[2:]) > max_res:
|
||||
depth_to_align = MarigoldImageProcessor.resize_to_max_edge(depth_to_align, max_res, "nearest-exact")
|
||||
|
||||
param = init_param(depth_to_align)
|
||||
|
||||
res = scipy.optimize.minimize(
|
||||
partial(cost_fn, depth=depth_to_align),
|
||||
param,
|
||||
method="BFGS",
|
||||
tol=tol,
|
||||
options={"maxiter": max_iter, "disp": False},
|
||||
)
|
||||
|
||||
return res.x
|
||||
|
||||
requires_aligning = scale_invariant or shift_invariant
|
||||
ensemble_size = depth.shape[0]
|
||||
|
||||
if requires_aligning:
|
||||
param = compute_param(depth)
|
||||
depth = align(depth, param)
|
||||
|
||||
depth, uncertainty = ensemble(depth, return_uncertainty=output_uncertainty)
|
||||
|
||||
depth_max = depth.max()
|
||||
if scale_invariant and shift_invariant:
|
||||
depth_min = depth.min()
|
||||
elif scale_invariant:
|
||||
depth_min = 0
|
||||
else:
|
||||
raise ValueError("Unrecognized alignment.")
|
||||
depth_range = (depth_max - depth_min).clamp(min=1e-6)
|
||||
depth = (depth - depth_min) / depth_range
|
||||
if output_uncertainty:
|
||||
uncertainty /= depth_range
|
||||
|
||||
return depth, uncertainty # [1,1,H,W], [1,1,H,W]
|
||||
@@ -0,0 +1,690 @@
|
||||
# Copyright 2024 Marigold authors, PRS ETH Zurich. All rights reserved.
|
||||
# Copyright 2024 The HuggingFace Team. All rights reserved.
|
||||
#
|
||||
# Licensed under the Apache License, Version 2.0 (the "License");
|
||||
# you may not use this file except in compliance with the License.
|
||||
# You may obtain a copy of the License at
|
||||
#
|
||||
# http://www.apache.org/licenses/LICENSE-2.0
|
||||
#
|
||||
# Unless required by applicable law or agreed to in writing, software
|
||||
# distributed under the License is distributed on an "AS IS" BASIS,
|
||||
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
||||
# See the License for the specific language governing permissions and
|
||||
# limitations under the License.
|
||||
# --------------------------------------------------------------------------
|
||||
# More information and citation instructions are available on the
|
||||
# Marigold project website: https://marigoldmonodepth.github.io
|
||||
# --------------------------------------------------------------------------
|
||||
from dataclasses import dataclass
|
||||
from typing import Any, Dict, List, Optional, Tuple, Union
|
||||
|
||||
import numpy as np
|
||||
import torch
|
||||
from PIL import Image
|
||||
from tqdm.auto import tqdm
|
||||
from transformers import CLIPTextModel, CLIPTokenizer
|
||||
|
||||
from ...image_processor import PipelineImageInput
|
||||
from ...models import (
|
||||
AutoencoderKL,
|
||||
UNet2DConditionModel,
|
||||
)
|
||||
from ...schedulers import (
|
||||
DDIMScheduler,
|
||||
LCMScheduler,
|
||||
)
|
||||
from ...utils import (
|
||||
BaseOutput,
|
||||
logging,
|
||||
replace_example_docstring,
|
||||
)
|
||||
from ...utils.torch_utils import randn_tensor
|
||||
from ..pipeline_utils import DiffusionPipeline
|
||||
from .marigold_image_processing import MarigoldImageProcessor
|
||||
|
||||
|
||||
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
|
||||
|
||||
|
||||
EXAMPLE_DOC_STRING = """
|
||||
Examples:
|
||||
```py
|
||||
>>> import diffusers
|
||||
>>> import torch
|
||||
|
||||
>>> pipe = diffusers.MarigoldNormalsPipeline.from_pretrained(
|
||||
... "prs-eth/marigold-normals-lcm-v0-1", variant="fp16", torch_dtype=torch.float16
|
||||
... ).to("cuda")
|
||||
|
||||
>>> image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
|
||||
>>> normals = pipe(image)
|
||||
|
||||
>>> vis = pipe.image_processor.visualize_normals(normals.prediction)
|
||||
>>> vis[0].save("einstein_normals.png")
|
||||
```
|
||||
"""
|
||||
|
||||
|
||||
@dataclass
|
||||
class MarigoldNormalsOutput(BaseOutput):
|
||||
"""
|
||||
Output class for Marigold monocular normals prediction pipeline.
|
||||
|
||||
Args:
|
||||
prediction (`np.ndarray`, `torch.Tensor`):
|
||||
Predicted normals with values in the range [-1, 1]. The shape is always $numimages \times 3 \times height
|
||||
\times width$, regardless of whether the images were passed as a 4D array or a list.
|
||||
uncertainty (`None`, `np.ndarray`, `torch.Tensor`):
|
||||
Uncertainty maps computed from the ensemble, with values in the range [0, 1]. The shape is $numimages
|
||||
\times 1 \times height \times width$.
|
||||
latent (`None`, `torch.Tensor`):
|
||||
Latent features corresponding to the predictions, compatible with the `latents` argument of the pipeline.
|
||||
The shape is $numimages * numensemble \times 4 \times latentheight \times latentwidth$.
|
||||
"""
|
||||
|
||||
prediction: Union[np.ndarray, torch.Tensor]
|
||||
uncertainty: Union[None, np.ndarray, torch.Tensor]
|
||||
latent: Union[None, torch.Tensor]
|
||||
|
||||
|
||||
class MarigoldNormalsPipeline(DiffusionPipeline):
|
||||
"""
|
||||
Pipeline for monocular normals estimation using the Marigold method: https://marigoldmonodepth.github.io.
|
||||
|
||||
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
|
||||
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
|
||||
|
||||
Args:
|
||||
unet (`UNet2DConditionModel`):
|
||||
Conditional U-Net to denoise the normals latent, conditioned on image latent.
|
||||
vae (`AutoencoderKL`):
|
||||
Variational Auto-Encoder (VAE) Model to encode and decode images and predictions to and from latent
|
||||
representations.
|
||||
scheduler (`DDIMScheduler` or `LCMScheduler`):
|
||||
A scheduler to be used in combination with `unet` to denoise the encoded image latents.
|
||||
text_encoder (`CLIPTextModel`):
|
||||
Text-encoder, for empty text embedding.
|
||||
tokenizer (`CLIPTokenizer`):
|
||||
CLIP tokenizer.
|
||||
prediction_type (`str`, *optional*):
|
||||
Type of predictions made by the model.
|
||||
use_full_z_range (`bool`, *optional*):
|
||||
Whether the normals predicted by this model utilize the full range of the Z dimension, or only its positive
|
||||
half.
|
||||
default_denoising_steps (`int`, *optional*):
|
||||
The minimum number of denoising diffusion steps that are required to produce a prediction of reasonable
|
||||
quality with the given model. This value must be set in the model config. When the pipeline is called
|
||||
without explicitly setting `num_inference_steps`, the default value is used. This is required to ensure
|
||||
reasonable results with various model flavors compatible with the pipeline, such as those relying on very
|
||||
short denoising schedules (`LCMScheduler`) and those with full diffusion schedules (`DDIMScheduler`).
|
||||
default_processing_resolution (`int`, *optional*):
|
||||
The recommended value of the `processing_resolution` parameter of the pipeline. This value must be set in
|
||||
the model config. When the pipeline is called without explicitly setting `processing_resolution`, the
|
||||
default value is used. This is required to ensure reasonable results with various model flavors trained
|
||||
with varying optimal processing resolution values.
|
||||
"""
|
||||
|
||||
model_cpu_offload_seq = "text_encoder->unet->vae"
|
||||
supported_prediction_types = ("normals",)
|
||||
|
||||
def __init__(
|
||||
self,
|
||||
unet: UNet2DConditionModel,
|
||||
vae: AutoencoderKL,
|
||||
scheduler: Union[DDIMScheduler, LCMScheduler],
|
||||
text_encoder: CLIPTextModel,
|
||||
tokenizer: CLIPTokenizer,
|
||||
prediction_type: Optional[str] = None,
|
||||
use_full_z_range: Optional[bool] = True,
|
||||
default_denoising_steps: Optional[int] = None,
|
||||
default_processing_resolution: Optional[int] = None,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
if prediction_type not in self.supported_prediction_types:
|
||||
logger.warning(
|
||||
f"Potentially unsupported `prediction_type='{prediction_type}'`; values supported by the pipeline: "
|
||||
f"{self.supported_prediction_types}."
|
||||
)
|
||||
|
||||
self.register_modules(
|
||||
unet=unet,
|
||||
vae=vae,
|
||||
scheduler=scheduler,
|
||||
text_encoder=text_encoder,
|
||||
tokenizer=tokenizer,
|
||||
)
|
||||
self.register_to_config(
|
||||
use_full_z_range=use_full_z_range,
|
||||
default_denoising_steps=default_denoising_steps,
|
||||
default_processing_resolution=default_processing_resolution,
|
||||
)
|
||||
|
||||
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
|
||||
|
||||
self.use_full_z_range = use_full_z_range
|
||||
self.default_denoising_steps = default_denoising_steps
|
||||
self.default_processing_resolution = default_processing_resolution
|
||||
|
||||
self.empty_text_embedding = None
|
||||
|
||||
self.image_processor = MarigoldImageProcessor(vae_scale_factor=self.vae_scale_factor)
|
||||
|
||||
def check_inputs(
|
||||
self,
|
||||
image: PipelineImageInput,
|
||||
num_inference_steps: int,
|
||||
ensemble_size: int,
|
||||
processing_resolution: int,
|
||||
resample_method_input: str,
|
||||
resample_method_output: str,
|
||||
batch_size: int,
|
||||
ensembling_kwargs: Optional[Dict[str, Any]],
|
||||
latents: Optional[torch.Tensor],
|
||||
generator: Optional[Union[torch.Generator, List[torch.Generator]]],
|
||||
output_type: str,
|
||||
output_uncertainty: bool,
|
||||
) -> int:
|
||||
if num_inference_steps is None:
|
||||
raise ValueError("`num_inference_steps` is not specified and could not be resolved from the model config.")
|
||||
if num_inference_steps < 1:
|
||||
raise ValueError("`num_inference_steps` must be positive.")
|
||||
if ensemble_size < 1:
|
||||
raise ValueError("`ensemble_size` must be positive.")
|
||||
if ensemble_size == 2:
|
||||
logger.warning(
|
||||
"`ensemble_size` == 2 results are similar to no ensembling (1); "
|
||||
"consider increasing the value to at least 3."
|
||||
)
|
||||
if ensemble_size == 1 and output_uncertainty:
|
||||
raise ValueError(
|
||||
"Computing uncertainty by setting `output_uncertainty=True` also requires setting `ensemble_size` "
|
||||
"greater than 1."
|
||||
)
|
||||
if processing_resolution is None:
|
||||
raise ValueError(
|
||||
"`processing_resolution` is not specified and could not be resolved from the model config."
|
||||
)
|
||||
if processing_resolution < 0:
|
||||
raise ValueError(
|
||||
"`processing_resolution` must be non-negative: 0 for native resolution, or any positive value for "
|
||||
"downsampled processing."
|
||||
)
|
||||
if processing_resolution % self.vae_scale_factor != 0:
|
||||
raise ValueError(f"`processing_resolution` must be a multiple of {self.vae_scale_factor}.")
|
||||
if resample_method_input not in ("nearest", "nearest-exact", "bilinear", "bicubic", "area"):
|
||||
raise ValueError(
|
||||
"`resample_method_input` takes string values compatible with PIL library: "
|
||||
"nearest, nearest-exact, bilinear, bicubic, area."
|
||||
)
|
||||
if resample_method_output not in ("nearest", "nearest-exact", "bilinear", "bicubic", "area"):
|
||||
raise ValueError(
|
||||
"`resample_method_output` takes string values compatible with PIL library: "
|
||||
"nearest, nearest-exact, bilinear, bicubic, area."
|
||||
)
|
||||
if batch_size < 1:
|
||||
raise ValueError("`batch_size` must be positive.")
|
||||
if output_type not in ["pt", "np"]:
|
||||
raise ValueError("`output_type` must be one of `pt` or `np`.")
|
||||
if latents is not None and generator is not None:
|
||||
raise ValueError("`latents` and `generator` cannot be used together.")
|
||||
if ensembling_kwargs is not None:
|
||||
if not isinstance(ensembling_kwargs, dict):
|
||||
raise ValueError("`ensembling_kwargs` must be a dictionary.")
|
||||
if "reduction" in ensembling_kwargs and ensembling_kwargs["reduction"] not in ("closest", "mean"):
|
||||
raise ValueError("`ensembling_kwargs['reduction']` can be either `'closest'` or `'mean'`.")
|
||||
|
||||
# image checks
|
||||
num_images = 0
|
||||
W, H = None, None
|
||||
if not isinstance(image, list):
|
||||
image = [image]
|
||||
for i, img in enumerate(image):
|
||||
if isinstance(img, np.ndarray) or torch.is_tensor(img):
|
||||
if img.ndim not in (2, 3, 4):
|
||||
raise ValueError(f"`image[{i}]` has unsupported dimensions or shape: {img.shape}.")
|
||||
H_i, W_i = img.shape[-2:]
|
||||
N_i = 1
|
||||
if img.ndim == 4:
|
||||
N_i = img.shape[0]
|
||||
elif isinstance(img, Image.Image):
|
||||
W_i, H_i = img.size
|
||||
N_i = 1
|
||||
else:
|
||||
raise ValueError(f"Unsupported `image[{i}]` type: {type(img)}.")
|
||||
if W is None:
|
||||
W, H = W_i, H_i
|
||||
elif (W, H) != (W_i, H_i):
|
||||
raise ValueError(
|
||||
f"Input `image[{i}]` has incompatible dimensions {(W_i, H_i)} with the previous images {(W, H)}"
|
||||
)
|
||||
num_images += N_i
|
||||
|
||||
# latents checks
|
||||
if latents is not None:
|
||||
if not torch.is_tensor(latents):
|
||||
raise ValueError("`latents` must be a torch.Tensor.")
|
||||
if latents.dim() != 4:
|
||||
raise ValueError(f"`latents` has unsupported dimensions or shape: {latents.shape}.")
|
||||
|
||||
if processing_resolution > 0:
|
||||
max_orig = max(H, W)
|
||||
new_H = H * processing_resolution // max_orig
|
||||
new_W = W * processing_resolution // max_orig
|
||||
if new_H == 0 or new_W == 0:
|
||||
raise ValueError(f"Extreme aspect ratio of the input image: [{W} x {H}]")
|
||||
W, H = new_W, new_H
|
||||
w = (W + self.vae_scale_factor - 1) // self.vae_scale_factor
|
||||
h = (H + self.vae_scale_factor - 1) // self.vae_scale_factor
|
||||
shape_expected = (num_images * ensemble_size, self.vae.config.latent_channels, h, w)
|
||||
|
||||
if latents.shape != shape_expected:
|
||||
raise ValueError(f"`latents` has unexpected shape={latents.shape} expected={shape_expected}.")
|
||||
|
||||
# generator checks
|
||||
if generator is not None:
|
||||
if isinstance(generator, list):
|
||||
if len(generator) != num_images * ensemble_size:
|
||||
raise ValueError(
|
||||
"The number of generators must match the total number of ensemble members for all input images."
|
||||
)
|
||||
if not all(g.device.type == generator[0].device.type for g in generator):
|
||||
raise ValueError("`generator` device placement is not consistent in the list.")
|
||||
elif not isinstance(generator, torch.Generator):
|
||||
raise ValueError(f"Unsupported generator type: {type(generator)}.")
|
||||
|
||||
return num_images
|
||||
|
||||
def progress_bar(self, iterable=None, total=None, desc=None, leave=True):
|
||||
if not hasattr(self, "_progress_bar_config"):
|
||||
self._progress_bar_config = {}
|
||||
elif not isinstance(self._progress_bar_config, dict):
|
||||
raise ValueError(
|
||||
f"`self._progress_bar_config` should be of type `dict`, but is {type(self._progress_bar_config)}."
|
||||
)
|
||||
|
||||
progress_bar_config = dict(**self._progress_bar_config)
|
||||
progress_bar_config["desc"] = progress_bar_config.get("desc", desc)
|
||||
progress_bar_config["leave"] = progress_bar_config.get("leave", leave)
|
||||
if iterable is not None:
|
||||
return tqdm(iterable, **progress_bar_config)
|
||||
elif total is not None:
|
||||
return tqdm(total=total, **progress_bar_config)
|
||||
else:
|
||||
raise ValueError("Either `total` or `iterable` has to be defined.")
|
||||
|
||||
@torch.no_grad()
|
||||
@replace_example_docstring(EXAMPLE_DOC_STRING)
|
||||
def __call__(
|
||||
self,
|
||||
image: PipelineImageInput,
|
||||
num_inference_steps: Optional[int] = None,
|
||||
ensemble_size: int = 1,
|
||||
processing_resolution: Optional[int] = None,
|
||||
match_input_resolution: bool = True,
|
||||
resample_method_input: str = "bilinear",
|
||||
resample_method_output: str = "bilinear",
|
||||
batch_size: int = 1,
|
||||
ensembling_kwargs: Optional[Dict[str, Any]] = None,
|
||||
latents: Optional[Union[torch.Tensor, List[torch.Tensor]]] = None,
|
||||
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
|
||||
output_type: str = "np",
|
||||
output_uncertainty: bool = False,
|
||||
output_latent: bool = False,
|
||||
return_dict: bool = True,
|
||||
):
|
||||
"""
|
||||
Function invoked when calling the pipeline.
|
||||
|
||||
Args:
|
||||
image (`PIL.Image.Image`, `np.ndarray`, `torch.Tensor`, `List[PIL.Image.Image]`, `List[np.ndarray]`),
|
||||
`List[torch.Tensor]`: An input image or images used as an input for the normals estimation task. For
|
||||
arrays and tensors, the expected value range is between `[0, 1]`. Passing a batch of images is possible
|
||||
by providing a four-dimensional array or a tensor. Additionally, a list of images of two- or
|
||||
three-dimensional arrays or tensors can be passed. In the latter case, all list elements must have the
|
||||
same width and height.
|
||||
num_inference_steps (`int`, *optional*, defaults to `None`):
|
||||
Number of denoising diffusion steps during inference. The default value `None` results in automatic
|
||||
selection. The number of steps should be at least 10 with the full Marigold models, and between 1 and 4
|
||||
for Marigold-LCM models.
|
||||
ensemble_size (`int`, defaults to `1`):
|
||||
Number of ensemble predictions. Recommended values are 5 and higher for better precision, or 1 for
|
||||
faster inference.
|
||||
processing_resolution (`int`, *optional*, defaults to `None`):
|
||||
Effective processing resolution. When set to `0`, matches the larger input image dimension. This
|
||||
produces crisper predictions, but may also lead to the overall loss of global context. The default
|
||||
value `None` resolves to the optimal value from the model config.
|
||||
match_input_resolution (`bool`, *optional*, defaults to `True`):
|
||||
When enabled, the output prediction is resized to match the input dimensions. When disabled, the longer
|
||||
side of the output will equal to `processing_resolution`.
|
||||
resample_method_input (`str`, *optional*, defaults to `"bilinear"`):
|
||||
Resampling method used to resize input images to `processing_resolution`. The accepted values are:
|
||||
`"nearest"`, `"nearest-exact"`, `"bilinear"`, `"bicubic"`, or `"area"`.
|
||||
resample_method_output (`str`, *optional*, defaults to `"bilinear"`):
|
||||
Resampling method used to resize output predictions to match the input resolution. The accepted values
|
||||
are `"nearest"`, `"nearest-exact"`, `"bilinear"`, `"bicubic"`, or `"area"`.
|
||||
batch_size (`int`, *optional*, defaults to `1`):
|
||||
Batch size; only matters when setting `ensemble_size` or passing a tensor of images.
|
||||
ensembling_kwargs (`dict`, *optional*, defaults to `None`)
|
||||
Extra dictionary with arguments for precise ensembling control. The following options are available:
|
||||
- reduction (`str`, *optional*, defaults to `"closest"`): Defines the ensembling function applied in
|
||||
every pixel location, can be either `"closest"` or `"mean"`.
|
||||
latents (`torch.Tensor`, *optional*, defaults to `None`):
|
||||
Latent noise tensors to replace the random initialization. These can be taken from the previous
|
||||
function call's output.
|
||||
generator (`torch.Generator`, or `List[torch.Generator]`, *optional*, defaults to `None`):
|
||||
Random number generator object to ensure reproducibility.
|
||||
output_type (`str`, *optional*, defaults to `"np"`):
|
||||
Preferred format of the output's `prediction` and the optional `uncertainty` fields. The accepted
|
||||
values are: `"np"` (numpy array) or `"pt"` (torch tensor).
|
||||
output_uncertainty (`bool`, *optional*, defaults to `False`):
|
||||
When enabled, the output's `uncertainty` field contains the predictive uncertainty map, provided that
|
||||
the `ensemble_size` argument is set to a value above 2.
|
||||
output_latent (`bool`, *optional*, defaults to `False`):
|
||||
When enabled, the output's `latent` field contains the latent codes corresponding to the predictions
|
||||
within the ensemble. These codes can be saved, modified, and used for subsequent calls with the
|
||||
`latents` argument.
|
||||
return_dict (`bool`, *optional*, defaults to `True`):
|
||||
Whether or not to return a [`~pipelines.marigold.MarigoldDepthOutput`] instead of a plain tuple.
|
||||
|
||||
Examples:
|
||||
|
||||
Returns:
|
||||
[`~pipelines.marigold.MarigoldNormalsOutput`] or `tuple`:
|
||||
If `return_dict` is `True`, [`~pipelines.marigold.MarigoldNormalsOutput`] is returned, otherwise a
|
||||
`tuple` is returned where the first element is the prediction, the second element is the uncertainty
|
||||
(or `None`), and the third is the latent (or `None`).
|
||||
"""
|
||||
|
||||
# 0. Resolving variables.
|
||||
device = self._execution_device
|
||||
dtype = self.dtype
|
||||
|
||||
# Model-specific optimal default values leading to fast and reasonable results.
|
||||
if num_inference_steps is None:
|
||||
num_inference_steps = self.default_denoising_steps
|
||||
if processing_resolution is None:
|
||||
processing_resolution = self.default_processing_resolution
|
||||
|
||||
# 1. Check inputs.
|
||||
num_images = self.check_inputs(
|
||||
image,
|
||||
num_inference_steps,
|
||||
ensemble_size,
|
||||
processing_resolution,
|
||||
resample_method_input,
|
||||
resample_method_output,
|
||||
batch_size,
|
||||
ensembling_kwargs,
|
||||
latents,
|
||||
generator,
|
||||
output_type,
|
||||
output_uncertainty,
|
||||
)
|
||||
|
||||
# 2. Prepare empty text conditioning.
|
||||
# Model invocation: self.tokenizer, self.text_encoder.
|
||||
if self.empty_text_embedding is None:
|
||||
prompt = ""
|
||||
text_inputs = self.tokenizer(
|
||||
prompt,
|
||||
padding="do_not_pad",
|
||||
max_length=self.tokenizer.model_max_length,
|
||||
truncation=True,
|
||||
return_tensors="pt",
|
||||
)
|
||||
text_input_ids = text_inputs.input_ids.to(device)
|
||||
self.empty_text_embedding = self.text_encoder(text_input_ids)[0] # [1,2,1024]
|
||||
|
||||
# 3. Preprocess input images. This function loads input image or images of compatible dimensions `(H, W)`,
|
||||
# optionally downsamples them to the `processing_resolution` `(PH, PW)`, where
|
||||
# `max(PH, PW) == processing_resolution`, and pads the dimensions to `(PPH, PPW)` such that these values are
|
||||
# divisible by the latent space downscaling factor (typically 8 in Stable Diffusion). The default value `None`
|
||||
# of `processing_resolution` resolves to the optimal value from the model config. It is a recommended mode of
|
||||
# operation and leads to the most reasonable results. Using the native image resolution or any other processing
|
||||
# resolution can lead to loss of either fine details or global context in the output predictions.
|
||||
image, padding, original_resolution = self.image_processor.preprocess(
|
||||
image, processing_resolution, resample_method_input, device, dtype
|
||||
) # [N,3,PPH,PPW]
|
||||
|
||||
# 4. Encode input image into latent space. At this step, each of the `N` input images is represented with `E`
|
||||
# ensemble members. Each ensemble member is an independent diffused prediction, just initialized independently.
|
||||
# Latents of each such predictions across all input images and all ensemble members are represented in the
|
||||
# `pred_latent` variable. The variable `image_latent` is of the same shape: it contains each input image encoded
|
||||
# into latent space and replicated `E` times. The latents can be either generated (see `generator` to ensure
|
||||
# reproducibility), or passed explicitly via the `latents` argument. The latter can be set outside the pipeline
|
||||
# code. For example, in the Marigold-LCM video processing demo, the latents initialization of a frame is taken
|
||||
# as a convex combination of the latents output of the pipeline for the previous frame and a newly-sampled
|
||||
# noise. This behavior can be achieved by setting the `output_latent` argument to `True`. The latent space
|
||||
# dimensions are `(h, w)`. Encoding into latent space happens in batches of size `batch_size`.
|
||||
# Model invocation: self.vae.encoder.
|
||||
image_latent, pred_latent = self.prepare_latents(
|
||||
image, latents, generator, ensemble_size, batch_size
|
||||
) # [N*E,4,h,w], [N*E,4,h,w]
|
||||
|
||||
del image
|
||||
|
||||
batch_empty_text_embedding = self.empty_text_embedding.to(device=device, dtype=dtype).repeat(
|
||||
batch_size, 1, 1
|
||||
) # [B,1024,2]
|
||||
|
||||
# 5. Process the denoising loop. All `N * E` latents are processed sequentially in batches of size `batch_size`.
|
||||
# The unet model takes concatenated latent spaces of the input image and the predicted modality as an input, and
|
||||
# outputs noise for the predicted modality's latent space. The number of denoising diffusion steps is defined by
|
||||
# `num_inference_steps`. It is either set directly, or resolves to the optimal value specific to the loaded
|
||||
# model.
|
||||
# Model invocation: self.unet.
|
||||
pred_latents = []
|
||||
|
||||
for i in self.progress_bar(
|
||||
range(0, num_images * ensemble_size, batch_size), leave=True, desc="Marigold predictions..."
|
||||
):
|
||||
batch_image_latent = image_latent[i : i + batch_size] # [B,4,h,w]
|
||||
batch_pred_latent = pred_latent[i : i + batch_size] # [B,4,h,w]
|
||||
effective_batch_size = batch_image_latent.shape[0]
|
||||
text = batch_empty_text_embedding[:effective_batch_size] # [B,2,1024]
|
||||
|
||||
self.scheduler.set_timesteps(num_inference_steps, device=device)
|
||||
for t in self.progress_bar(self.scheduler.timesteps, leave=False, desc="Diffusion steps..."):
|
||||
batch_latent = torch.cat([batch_image_latent, batch_pred_latent], dim=1) # [B,8,h,w]
|
||||
noise = self.unet(batch_latent, t, encoder_hidden_states=text, return_dict=False)[0] # [B,4,h,w]
|
||||
batch_pred_latent = self.scheduler.step(
|
||||
noise, t, batch_pred_latent, generator=generator
|
||||
).prev_sample # [B,4,h,w]
|
||||
|
||||
pred_latents.append(batch_pred_latent)
|
||||
|
||||
pred_latent = torch.cat(pred_latents, dim=0) # [N*E,4,h,w]
|
||||
|
||||
del (
|
||||
pred_latents,
|
||||
image_latent,
|
||||
batch_empty_text_embedding,
|
||||
batch_image_latent,
|
||||
batch_pred_latent,
|
||||
text,
|
||||
batch_latent,
|
||||
noise,
|
||||
)
|
||||
|
||||
# 6. Decode predictions from latent into pixel space. The resulting `N * E` predictions have shape `(PPH, PPW)`,
|
||||
# which requires slight postprocessing. Decoding into pixel space happens in batches of size `batch_size`.
|
||||
# Model invocation: self.vae.decoder.
|
||||
prediction = torch.cat(
|
||||
[
|
||||
self.decode_prediction(pred_latent[i : i + batch_size])
|
||||
for i in range(0, pred_latent.shape[0], batch_size)
|
||||
],
|
||||
dim=0,
|
||||
) # [N*E,3,PPH,PPW]
|
||||
|
||||
if not output_latent:
|
||||
pred_latent = None
|
||||
|
||||
# 7. Remove padding. The output shape is (PH, PW).
|
||||
prediction = self.image_processor.unpad_image(prediction, padding) # [N*E,3,PH,PW]
|
||||
|
||||
# 8. Ensemble and compute uncertainty (when `output_uncertainty` is set). This code treats each of the `N`
|
||||
# groups of `E` ensemble predictions independently. For each group it computes an ensembled prediction of shape
|
||||
# `(PH, PW)` and an optional uncertainty map of the same dimensions. After computing this pair of outputs for
|
||||
# each group independently, it stacks them respectively into batches of `N` almost final predictions and
|
||||
# uncertainty maps.
|
||||
uncertainty = None
|
||||
if ensemble_size > 1:
|
||||
prediction = prediction.reshape(num_images, ensemble_size, *prediction.shape[1:]) # [N,E,3,PH,PW]
|
||||
prediction = [
|
||||
self.ensemble_normals(prediction[i], output_uncertainty, **(ensembling_kwargs or {}))
|
||||
for i in range(num_images)
|
||||
] # [ [[1,3,PH,PW], [1,1,PH,PW]], ... ]
|
||||
prediction, uncertainty = zip(*prediction) # [[1,3,PH,PW], ... ], [[1,1,PH,PW], ... ]
|
||||
prediction = torch.cat(prediction, dim=0) # [N,3,PH,PW]
|
||||
if output_uncertainty:
|
||||
uncertainty = torch.cat(uncertainty, dim=0) # [N,1,PH,PW]
|
||||
else:
|
||||
uncertainty = None
|
||||
|
||||
# 9. If `match_input_resolution` is set, the output prediction and the uncertainty are upsampled to match the
|
||||
# input resolution `(H, W)`. This step may introduce upsampling artifacts, and therefore can be disabled.
|
||||
# After upsampling, the native resolution normal maps are renormalized to unit length to reduce the artifacts.
|
||||
# Depending on the downstream use-case, upsampling can be also chosen based on the tolerated artifacts by
|
||||
# setting the `resample_method_output` parameter (e.g., to `"nearest"`).
|
||||
if match_input_resolution:
|
||||
prediction = self.image_processor.resize_antialias(
|
||||
prediction, original_resolution, resample_method_output, is_aa=False
|
||||
) # [N,3,H,W]
|
||||
prediction = self.normalize_normals(prediction) # [N,3,H,W]
|
||||
if uncertainty is not None and output_uncertainty:
|
||||
uncertainty = self.image_processor.resize_antialias(
|
||||
uncertainty, original_resolution, resample_method_output, is_aa=False
|
||||
) # [N,1,H,W]
|
||||
|
||||
# 10. Prepare the final outputs.
|
||||
if output_type == "np":
|
||||
prediction = self.image_processor.pt_to_numpy(prediction) # [N,H,W,3]
|
||||
if uncertainty is not None and output_uncertainty:
|
||||
uncertainty = self.image_processor.pt_to_numpy(uncertainty) # [N,H,W,1]
|
||||
|
||||
# 11. Offload all models
|
||||
self.maybe_free_model_hooks()
|
||||
|
||||
if not return_dict:
|
||||
return (prediction, uncertainty, pred_latent)
|
||||
|
||||
return MarigoldNormalsOutput(
|
||||
prediction=prediction,
|
||||
uncertainty=uncertainty,
|
||||
latent=pred_latent,
|
||||
)
|
||||
|
||||
# Copied from diffusers.pipelines.marigold.pipeline_marigold_depth.MarigoldDepthPipeline.prepare_latents
|
||||
def prepare_latents(
|
||||
self,
|
||||
image: torch.Tensor,
|
||||
latents: Optional[torch.Tensor],
|
||||
generator: Optional[torch.Generator],
|
||||
ensemble_size: int,
|
||||
batch_size: int,
|
||||
) -> Tuple[torch.Tensor, torch.Tensor]:
|
||||
def retrieve_latents(encoder_output):
|
||||
if hasattr(encoder_output, "latent_dist"):
|
||||
return encoder_output.latent_dist.mode()
|
||||
elif hasattr(encoder_output, "latents"):
|
||||
return encoder_output.latents
|
||||
else:
|
||||
raise AttributeError("Could not access latents of provided encoder_output")
|
||||
|
||||
image_latent = torch.cat(
|
||||
[
|
||||
retrieve_latents(self.vae.encode(image[i : i + batch_size]))
|
||||
for i in range(0, image.shape[0], batch_size)
|
||||
],
|
||||
dim=0,
|
||||
) # [N,4,h,w]
|
||||
image_latent = image_latent * self.vae.config.scaling_factor
|
||||
image_latent = image_latent.repeat_interleave(ensemble_size, dim=0) # [N*E,4,h,w]
|
||||
|
||||
pred_latent = latents
|
||||
if pred_latent is None:
|
||||
pred_latent = randn_tensor(
|
||||
image_latent.shape,
|
||||
generator=generator,
|
||||
device=image_latent.device,
|
||||
dtype=image_latent.dtype,
|
||||
) # [N*E,4,h,w]
|
||||
|
||||
return image_latent, pred_latent
|
||||
|
||||
def decode_prediction(self, pred_latent: torch.Tensor) -> torch.Tensor:
|
||||
if pred_latent.dim() != 4 or pred_latent.shape[1] != self.vae.config.latent_channels:
|
||||
raise ValueError(
|
||||
f"Expecting 4D tensor of shape [B,{self.vae.config.latent_channels},H,W]; got {pred_latent.shape}."
|
||||
)
|
||||
|
||||
prediction = self.vae.decode(pred_latent / self.vae.config.scaling_factor, return_dict=False)[0] # [B,3,H,W]
|
||||
|
||||
prediction = torch.clip(prediction, -1.0, 1.0)
|
||||
|
||||
if not self.use_full_z_range:
|
||||
prediction[:, 2, :, :] *= 0.5
|
||||
prediction[:, 2, :, :] += 0.5
|
||||
|
||||
prediction = self.normalize_normals(prediction) # [B,3,H,W]
|
||||
|
||||
return prediction # [B,3,H,W]
|
||||
|
||||
@staticmethod
|
||||
def normalize_normals(normals: torch.Tensor, eps: float = 1e-6) -> torch.Tensor:
|
||||
if normals.dim() != 4 or normals.shape[1] != 3:
|
||||
raise ValueError(f"Expecting 4D tensor of shape [B,3,H,W]; got {normals.shape}.")
|
||||
|
||||
norm = torch.norm(normals, dim=1, keepdim=True)
|
||||
normals /= norm.clamp(min=eps)
|
||||
|
||||
return normals
|
||||
|
||||
@staticmethod
|
||||
def ensemble_normals(
|
||||
normals: torch.Tensor, output_uncertainty: bool, reduction: str = "closest"
|
||||
) -> Tuple[torch.Tensor, Optional[torch.Tensor]]:
|
||||
"""
|
||||
Ensembles the normals maps represented by the `normals` tensor with expected shape `(B, 3, H, W)`, where B is
|
||||
the number of ensemble members for a given prediction of size `(H x W)`.
|
||||
|
||||
Args:
|
||||
normals (`torch.Tensor`):
|
||||
Input ensemble normals maps.
|
||||
output_uncertainty (`bool`, *optional*, defaults to `False`):
|
||||
Whether to output uncertainty map.
|
||||
reduction (`str`, *optional*, defaults to `"closest"`):
|
||||
Reduction method used to ensemble aligned predictions. The accepted values are: `"closest"` and
|
||||
`"mean"`.
|
||||
|
||||
Returns:
|
||||
A tensor of aligned and ensembled normals maps with shape `(1, 3, H, W)` and optionally a tensor of
|
||||
uncertainties of shape `(1, 1, H, W)`.
|
||||
"""
|
||||
if normals.dim() != 4 or normals.shape[1] != 3:
|
||||
raise ValueError(f"Expecting 4D tensor of shape [B,3,H,W]; got {normals.shape}.")
|
||||
if reduction not in ("closest", "mean"):
|
||||
raise ValueError(f"Unrecognized reduction method: {reduction}.")
|
||||
|
||||
mean_normals = normals.mean(dim=0, keepdim=True) # [1,3,H,W]
|
||||
mean_normals = MarigoldNormalsPipeline.normalize_normals(mean_normals) # [1,3,H,W]
|
||||
|
||||
sim_cos = (mean_normals * normals).sum(dim=1, keepdim=True) # [E,1,H,W]
|
||||
sim_cos = sim_cos.clamp(-1, 1) # required to avoid NaN in uncertainty with fp16
|
||||
|
||||
uncertainty = None
|
||||
if output_uncertainty:
|
||||
uncertainty = sim_cos.arccos() # [E,1,H,W]
|
||||
uncertainty = uncertainty.mean(dim=0, keepdim=True) / np.pi # [1,1,H,W]
|
||||
|
||||
if reduction == "mean":
|
||||
return mean_normals, uncertainty # [1,3,H,W], [1,1,H,W]
|
||||
|
||||
closest_indices = sim_cos.argmax(dim=0, keepdim=True) # [1,1,H,W]
|
||||
closest_indices = closest_indices.repeat(1, 3, 1, 1) # [1,3,H,W]
|
||||
closest_normals = torch.gather(normals, 0, closest_indices) # [1,3,H,W]
|
||||
|
||||
return closest_normals, uncertainty # [1,3,H,W], [1,1,H,W]
|
||||
@@ -608,6 +608,7 @@ def load_sub_model(
|
||||
cached_folder: Union[str, os.PathLike],
|
||||
):
|
||||
"""Helper method to load the module `name` from `library_name` and `class_name`"""
|
||||
|
||||
# retrieve class candidates
|
||||
|
||||
class_obj, class_candidates = get_class_obj_and_candidates(
|
||||
|
||||
@@ -22,7 +22,7 @@ import torch
|
||||
from transformers import T5EncoderModel, T5Tokenizer
|
||||
|
||||
from ...image_processor import PixArtImageProcessor
|
||||
from ...models import AutoencoderKL, Transformer2DModel
|
||||
from ...models import AutoencoderKL, PixArtTransformer2DModel
|
||||
from ...schedulers import DPMSolverMultistepScheduler
|
||||
from ...utils import (
|
||||
BACKENDS_MAPPING,
|
||||
@@ -246,8 +246,8 @@ class PixArtAlphaPipeline(DiffusionPipeline):
|
||||
tokenizer (`T5Tokenizer`):
|
||||
Tokenizer of class
|
||||
[T5Tokenizer](https://huggingface.co/docs/transformers/model_doc/t5#transformers.T5Tokenizer).
|
||||
transformer ([`Transformer2DModel`]):
|
||||
A text conditioned `Transformer2DModel` to denoise the encoded image latents.
|
||||
transformer ([`PixArtTransformer2DModel`]):
|
||||
A text conditioned `PixArtTransformer2DModel` to denoise the encoded image latents.
|
||||
scheduler ([`SchedulerMixin`]):
|
||||
A scheduler to be used in combination with `transformer` to denoise the encoded image latents.
|
||||
"""
|
||||
@@ -276,7 +276,7 @@ class PixArtAlphaPipeline(DiffusionPipeline):
|
||||
tokenizer: T5Tokenizer,
|
||||
text_encoder: T5EncoderModel,
|
||||
vae: AutoencoderKL,
|
||||
transformer: Transformer2DModel,
|
||||
transformer: PixArtTransformer2DModel,
|
||||
scheduler: DPMSolverMultistepScheduler,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
@@ -22,7 +22,7 @@ import torch
|
||||
from transformers import T5EncoderModel, T5Tokenizer
|
||||
|
||||
from ...image_processor import PixArtImageProcessor
|
||||
from ...models import AutoencoderKL, Transformer2DModel
|
||||
from ...models import AutoencoderKL, PixArtTransformer2DModel
|
||||
from ...schedulers import KarrasDiffusionSchedulers
|
||||
from ...utils import (
|
||||
BACKENDS_MAPPING,
|
||||
@@ -202,7 +202,7 @@ class PixArtSigmaPipeline(DiffusionPipeline):
|
||||
tokenizer: T5Tokenizer,
|
||||
text_encoder: T5EncoderModel,
|
||||
vae: AutoencoderKL,
|
||||
transformer: Transformer2DModel,
|
||||
transformer: PixArtTransformer2DModel,
|
||||
scheduler: KarrasDiffusionSchedulers,
|
||||
):
|
||||
super().__init__()
|
||||
|
||||
@@ -211,7 +211,7 @@ class DDIMScheduler(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
# Rescale for zero SNR
|
||||
if rescale_betas_zero_snr:
|
||||
|
||||
@@ -207,7 +207,7 @@ class DDIMInverseScheduler(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
# Rescale for zero SNR
|
||||
if rescale_betas_zero_snr:
|
||||
|
||||
@@ -218,7 +218,7 @@ class DDIMParallelScheduler(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
# Rescale for zero SNR
|
||||
if rescale_betas_zero_snr:
|
||||
|
||||
@@ -211,7 +211,7 @@ class DDPMScheduler(SchedulerMixin, ConfigMixin):
|
||||
betas = torch.linspace(-6, 6, num_train_timesteps)
|
||||
self.betas = torch.sigmoid(betas) * (beta_end - beta_start) + beta_start
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
# Rescale for zero SNR
|
||||
if rescale_betas_zero_snr:
|
||||
|
||||
@@ -219,7 +219,7 @@ class DDPMParallelScheduler(SchedulerMixin, ConfigMixin):
|
||||
betas = torch.linspace(-6, 6, num_train_timesteps)
|
||||
self.betas = torch.sigmoid(betas) * (beta_end - beta_start) + beta_start
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
# Rescale for zero SNR
|
||||
if rescale_betas_zero_snr:
|
||||
|
||||
@@ -152,7 +152,7 @@ class DEISMultistepScheduler(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
self.alphas = 1.0 - self.betas
|
||||
self.alphas_cumprod = torch.cumprod(self.alphas, dim=0)
|
||||
@@ -170,13 +170,13 @@ class DEISMultistepScheduler(SchedulerMixin, ConfigMixin):
|
||||
if algorithm_type in ["dpmsolver", "dpmsolver++"]:
|
||||
self.register_to_config(algorithm_type="deis")
|
||||
else:
|
||||
raise NotImplementedError(f"{algorithm_type} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{algorithm_type} is not implemented for {self.__class__}")
|
||||
|
||||
if solver_type not in ["logrho"]:
|
||||
if solver_type in ["midpoint", "heun", "bh1", "bh2"]:
|
||||
self.register_to_config(solver_type="logrho")
|
||||
else:
|
||||
raise NotImplementedError(f"solver type {solver_type} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"solver type {solver_type} is not implemented for {self.__class__}")
|
||||
|
||||
# setable values
|
||||
self.num_inference_steps = None
|
||||
|
||||
@@ -229,7 +229,7 @@ class DPMSolverMultistepScheduler(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
if rescale_betas_zero_snr:
|
||||
self.betas = rescale_zero_terminal_snr(self.betas)
|
||||
@@ -256,13 +256,13 @@ class DPMSolverMultistepScheduler(SchedulerMixin, ConfigMixin):
|
||||
if algorithm_type == "deis":
|
||||
self.register_to_config(algorithm_type="dpmsolver++")
|
||||
else:
|
||||
raise NotImplementedError(f"{algorithm_type} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{algorithm_type} is not implemented for {self.__class__}")
|
||||
|
||||
if solver_type not in ["midpoint", "heun"]:
|
||||
if solver_type in ["logrho", "bh1", "bh2"]:
|
||||
self.register_to_config(solver_type="midpoint")
|
||||
else:
|
||||
raise NotImplementedError(f"{solver_type} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{solver_type} is not implemented for {self.__class__}")
|
||||
|
||||
if algorithm_type not in ["dpmsolver++", "sde-dpmsolver++"] and final_sigmas_type == "zero":
|
||||
raise ValueError(
|
||||
|
||||
@@ -182,9 +182,9 @@ class FlaxDPMSolverMultistepScheduler(FlaxSchedulerMixin, ConfigMixin):
|
||||
|
||||
# settings for DPM-Solver
|
||||
if self.config.algorithm_type not in ["dpmsolver", "dpmsolver++"]:
|
||||
raise NotImplementedError(f"{self.config.algorithm_type} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{self.config.algorithm_type} is not implemented for {self.__class__}")
|
||||
if self.config.solver_type not in ["midpoint", "heun"]:
|
||||
raise NotImplementedError(f"{self.config.solver_type} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{self.config.solver_type} is not implemented for {self.__class__}")
|
||||
|
||||
# standard deviation of the initial noise distribution
|
||||
init_noise_sigma = jnp.array(1.0, dtype=self.dtype)
|
||||
|
||||
@@ -178,7 +178,7 @@ class DPMSolverMultistepInverseScheduler(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
self.alphas = 1.0 - self.betas
|
||||
self.alphas_cumprod = torch.cumprod(self.alphas, dim=0)
|
||||
@@ -196,13 +196,13 @@ class DPMSolverMultistepInverseScheduler(SchedulerMixin, ConfigMixin):
|
||||
if algorithm_type == "deis":
|
||||
self.register_to_config(algorithm_type="dpmsolver++")
|
||||
else:
|
||||
raise NotImplementedError(f"{algorithm_type} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{algorithm_type} is not implemented for {self.__class__}")
|
||||
|
||||
if solver_type not in ["midpoint", "heun"]:
|
||||
if solver_type in ["logrho", "bh1", "bh2"]:
|
||||
self.register_to_config(solver_type="midpoint")
|
||||
else:
|
||||
raise NotImplementedError(f"{solver_type} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{solver_type} is not implemented for {self.__class__}")
|
||||
|
||||
# setable values
|
||||
self.num_inference_steps = None
|
||||
|
||||
@@ -184,7 +184,7 @@ class DPMSolverSDEScheduler(SchedulerMixin, ConfigMixin):
|
||||
# Glide cosine schedule
|
||||
self.betas = betas_for_alpha_bar(num_train_timesteps)
|
||||
else:
|
||||
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
|
||||
raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")
|
||||
|
||||
self.alphas = 1.0 - self.betas
|
||||
self.alphas_cumprod = torch.cumprod(self.alphas, dim=0)
|
||||
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user